다음 강의를 요약한 글입니다.
https://youtube.com/playlist?list=PLX-Ur4rl2-qwNB3cD5UAGo-RPe5IBw1pu&feature=shared
2024 ROS 스터디 2주차
www.youtube.com
ROS 용어 정리
Master: 노드와 노드 사이의 연결하고 네임서버, 통신을 서포트 합니다. roscore를 통해 실행합니다.
Node: 실행되는 최소 단위의 프로세서로 하나의 목적에 하나의 노드를 개발하는 것이 일반적입니다.
Package: ROS를 구성하는 기본 단위로 하나 이상의 노드를 포함하거나 다른 패키지의 노드를 실행하기 위한 설정 파일을 포함합니다.
Message: 노드간 데이터를 주고 받기위해 사용합니다.
Publish: 토픽의 내용을 메시지 형태로 송신합니다.
Publisher: 마스터에 정보를 등록하고 Subscriber 노드에 메시지를 보냅니다.
Topic: 메시지의 이름으로 Subscriber노드는 원하는 토픽의 메시지를 구독하여 수신할 수 있습니다.
Subscribe: 토픽의 내용을 메시지 형태로 수신합니다.
Subscriber: 마스터에 정보를 등록하고 Publisher 노드로 부터 메시지를 받습니다.


ros 명령어
roscd: ROS 패키지 디렉터리로 이동
rosls: ROS 패키지 목록 확인
rosed: ROS패키지 편집
rospd: ROS 디렉터리 인덱스에 디렉터리 추가
rosd: ROS 디렉터리 인덱스 확인
ROS 실행 명령어
roscore : master(ROS 네임 서비스), rosout(로그 기록), parameter sever(파라미터 관리)
rosrun : 노드 실
roslaunch : 노드를 여러 개 실행 및 실행 옵션 설정
rosclean : ROS 로그 파일을 검사하거나 삭제
ROS 정보 명령어
rostopic : ROS 토픽 정보 확인
rosservice : ROS 서비스 정보 확인
rosnode : ROS 노드 정보 확인
rosparam : ROS 파라미터 정보 확인, 수정
rosbag : ROS 메시지 기록, 재생
rosmsg : ROS 메시지 정보 확인
rossrv : ROS 서비스 정보 확인
rosversion : ROS 패키지 및 배포 릴리즈 버전 정보 확인
roswtf : ROS 시스템 검사
ROS catkin 명령어
catkin_create_pkg : 패키지 자동 생성
catkin_make : 캐킨 빌드 시스템에 기반을 둔 빌드
catkin_eclipse : 캐킨 빌드 시스템으로 생성한 패키지를 이클립스에서 사용할 수 있게 변경
catkin_prepare_release : 릴리즈할 때 사용되는 로그 정리 및 버전 태깅
catkin_generate_changelog : 릴리즈할 때 CHANGELOG.rst 파일 생성 또는 업데이트
catkin_init_workspace : 캐킨 빌드 시스템의 작업 폴더 초기화
catkin_find : 캐킨 검색
ROS 패키지 명령어
rospack : ROS 패키지와 관련된 정보 보기
rosinstall : ROS 추가 패키지 설치
rosdep : 해당 패키지의 의존성 파일 설치
roslocate : ROS 패키지 정보 관련 명령어
roscreate-pkg : ROS 패키지 자동 생성
rosmake : ROS 패키지를 빌드

ROS의 RVIZ 기능을 활용하여 토픽을 시각화 할 수 있습니다.
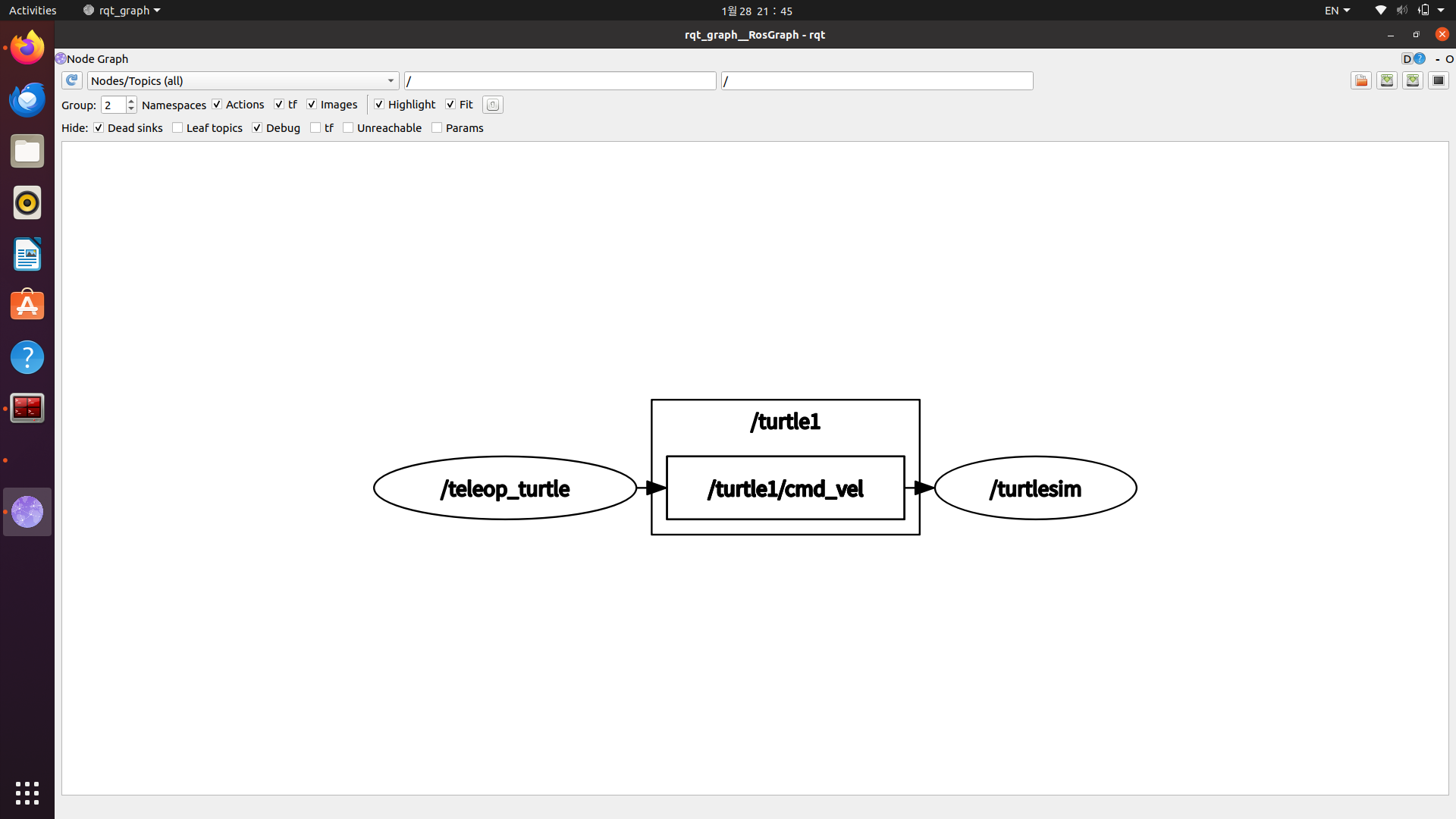
rqt_graph를 활용하면 현재 토픽의 연결 상태를 확인할 수 있습니다.
'FOSCAR-(Autonomous Driving) > ROS 스터디' 카테고리의 다른 글
| [2024 ROS 스터디] 정주광 #2주차 - ROS 명령어 및 도구 (1) | 2024.02.05 |
|---|---|
| [2024 ROS 스터디] 이하람 #2주차 - ROS 명령어 및 도구 (0) | 2024.02.04 |
| [2024 ROS 스터디] 정성진 #2주차 - ROS 명령어 및 도구 (2) | 2024.02.04 |
| [2024 ROS 스터디] 민경서 #2주차 - ROS 명령어 및 도구 (0) | 2024.02.04 |
| [2024 ROS 스터디] 이준호 #2주차 - ROS 명령어 및 도구 (0) | 2024.02.04 |



