반응형
ROS Courses (한국어)
https://github.com/robotpilot/ros-seminar
www.youtube.com
이 글은 ROBOTIS OpenSourceTeam의 ROS Courses 강의를 보고 정리한 글이다. 이번 주에는 Chapter 11에 대해 공부해 보았다.
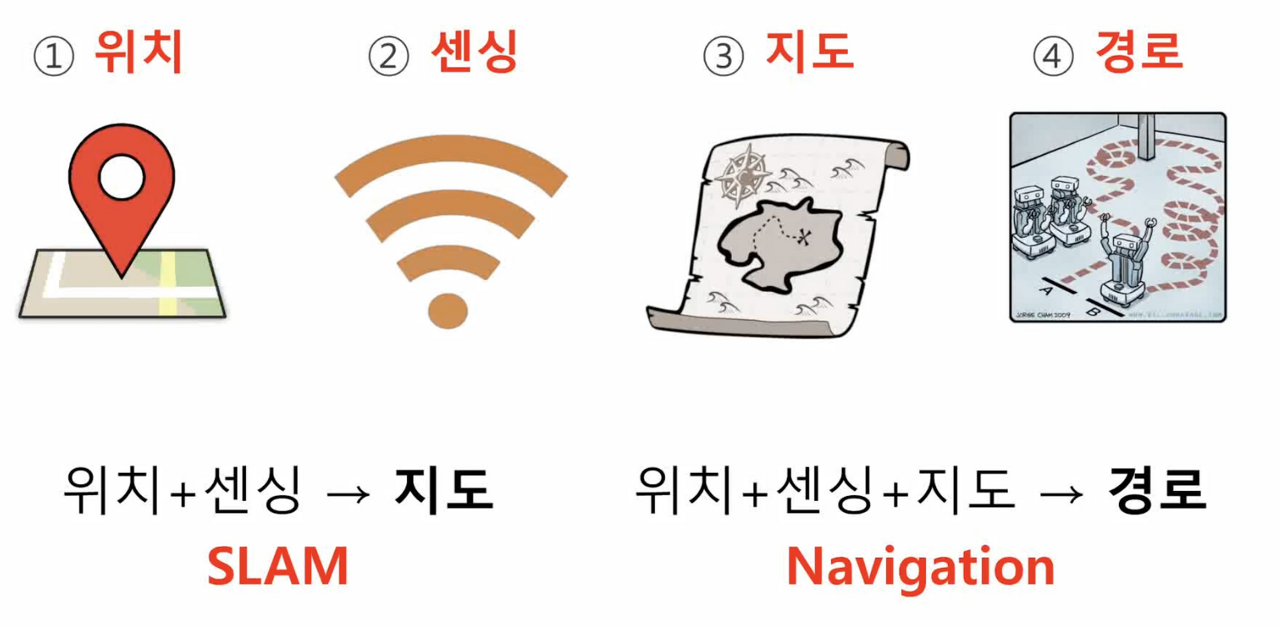
길 찾기에 필요한 것은 4가지이다.
1. 위치
2. 센싱
3. 지도
4. 경로
 SLAM & Navigation 실습
SLAM & Navigation 실습
1. 라이브러리 설치 (ROS Noetic 기준)
sudo apt install ros-noetic-joy ros-noetic-teleop-twist-joy ros-noetic-teleop-twist-keyboard ros-noetic-laser-proc ros-noetic-rgbd-launch ros-noetic-depthimage-to-laserscan ros-noetic-rosserial-arduino ros-noetic-rosserial-python ros-noetic-rosserial-server ros-noetic-rosserial-client ros-noetic-rosserial-msgs ros-noetic-amcl ros-noetic-map-server ros-noetic-move-base ros-noetic-urdf ros-noetic-xacro ros-noetic-compressed-image-transport ros-noetic-rqt-image-view ros-noetic-gmapping ros-noetic-navigation
2. Gazebo, Rviz
export TURTLEBOT3_MODEL=waffle
$ roslaunch turtlebot3_gazebo turtlebot3_world.launch
$ roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
launch 파일 실행 시 해당 에러가 발생한다면 source ~/workspace/devel/setup.bash를 실행하고 진행하면 된다. (매번 하기 귀찮으니 bashrc에 넣어놓자)


3. SLAM
맵 생성 후 teleop을 통한 맵 구조 파악
export TURTLEBOT3_MODEL=waffle
$ roslaunch turtlebot3_gazebo turtlebot3_world.launch
$ roslaunch turtlebot3_slam turtlebot3_slam.launch slam_methods:=gmapping
$ roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch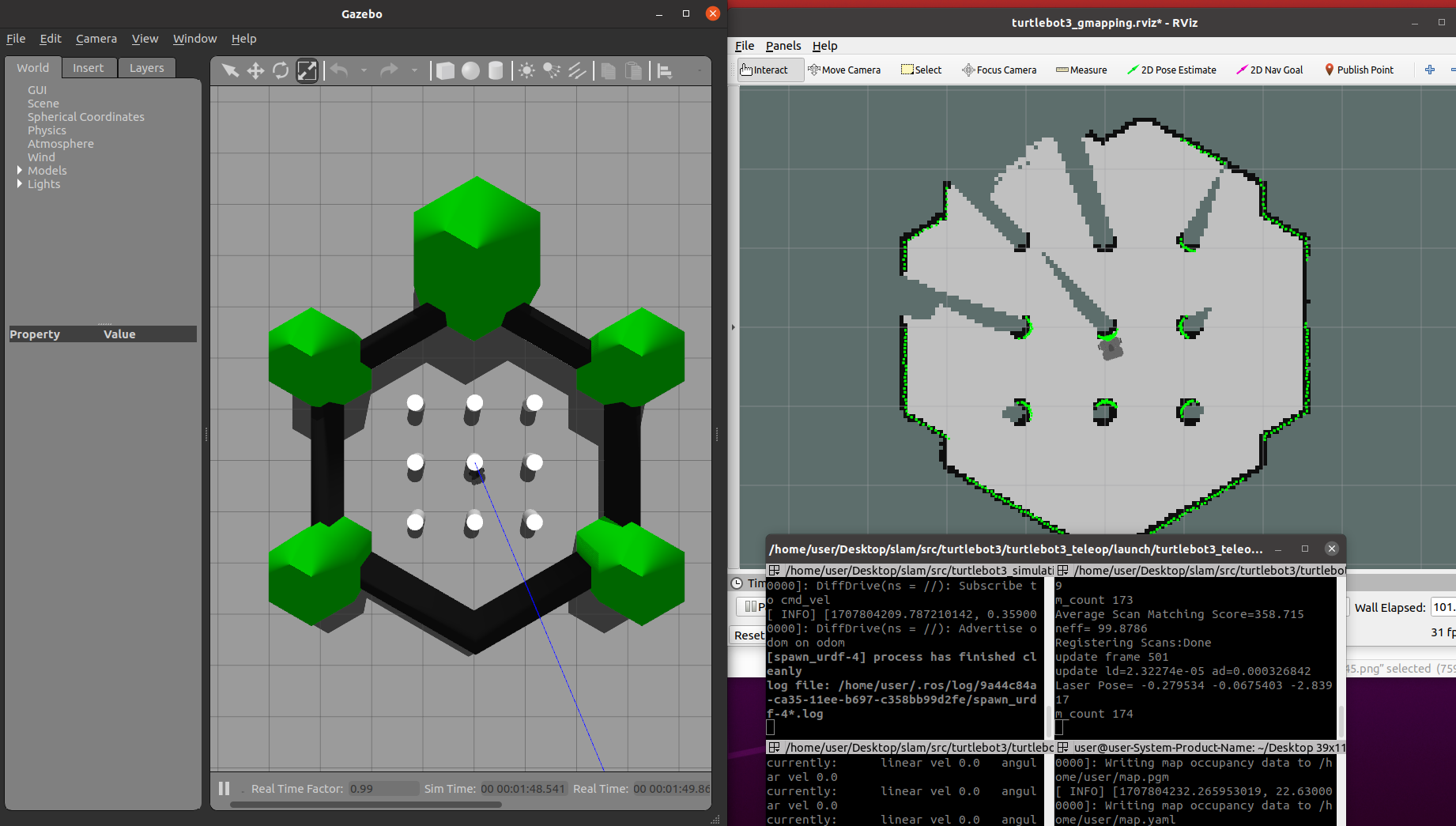
map 생성

반응형
'FOSCAR-(Autonomous Driving) > ROS 스터디' 카테고리의 다른 글
| [2024 ROS 스터디] 이상혁 #2주차 - ROS 명령어 및 도구 (0) | 2024.02.13 |
|---|---|
| [2024 ROS 스터디] 변수양 #3주차 - ROS 기본 프로그래밍 (0) | 2024.02.13 |
| [2024 ROS 스터디] 유민아 #3주차 <워크스페이스 구성하기> (1) | 2024.02.13 |
| [2024 ROS 스터디] 손희문 #3주차 - ROS 기본 프로그래밍 (0) | 2024.02.11 |
| [2024 ROS 스터디] 이강욱 #3주차 - ROS 기본 프로그래밍 (1) | 2024.02.11 |



