ROS 용어에 대해 알아보자!
ROS Courses (한국어)
https://github.com/robotpilot/ros-seminar
www.youtube.com
위의 링크에 들어가면 챕터 별로 강의를 볼 수 있다. 지난 주에 이어 이번 주에는 Chapter 4, 5, 6을 보고 공부하였다.
이번에 Chapter 6에서 실습을 하는데 에러들도 많이 뜨고 어렵게 성공해내어 실습을 중심으로 정리해보았다..
(이론 위주인 Chapter 4, 5는 개인 블로그에 정리해두었다.)
Chpater 06.
ROS 도구
Command-Line Tools
- GUI 없이 ROS에서 제공되는 명령어로만 로봇 억세스 및 거의 모든 ROS 기능을 소화
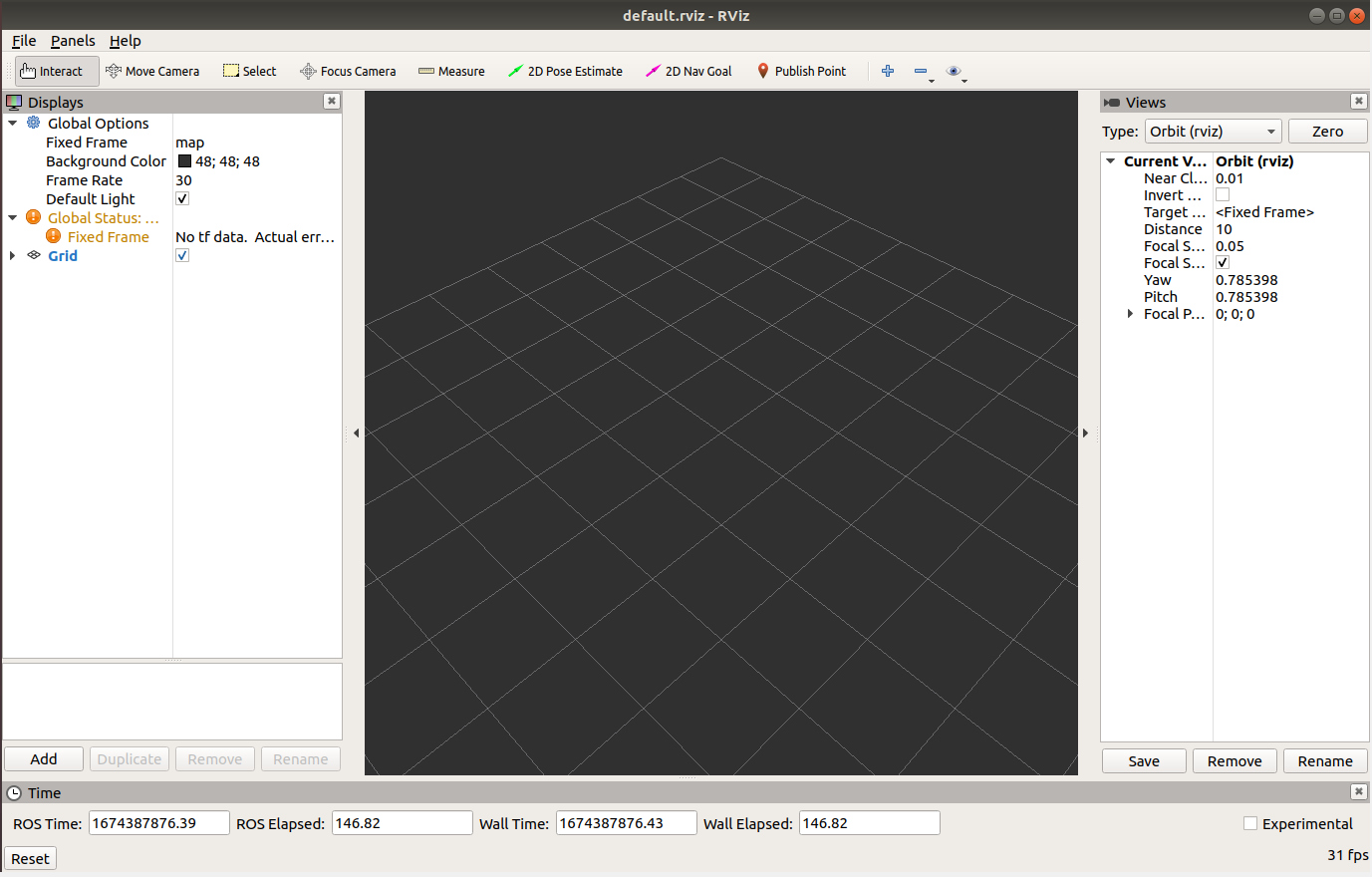
RViz (ROS Visualization Tool)
RViz란?
- ROS의 3D 시각화툴 - 센서 데이터의 시각화, 레이저 거리 센서(LDS)의 거리 데이터, 카메라의 영상 데이터 등
- 로봇 외형의 표시와 계획된 동작을 표현 - URDF ( Unified Robot Description Format)
- 내비게이션
- 매니퓰레이션
- 원격 제어
RViz를 이용하면 센서 및 로봇 관련 데이터 시각화가 매우 간단!
설치하는 법
sudo apt-get install ros-kinetic-rviz
위의 명령어를 terminal에 입력하여 설치
실행하는 법
rosrun rviz rviz
rviz
둘 중 하나를 terminal에 입력해주면 실행
실행화면
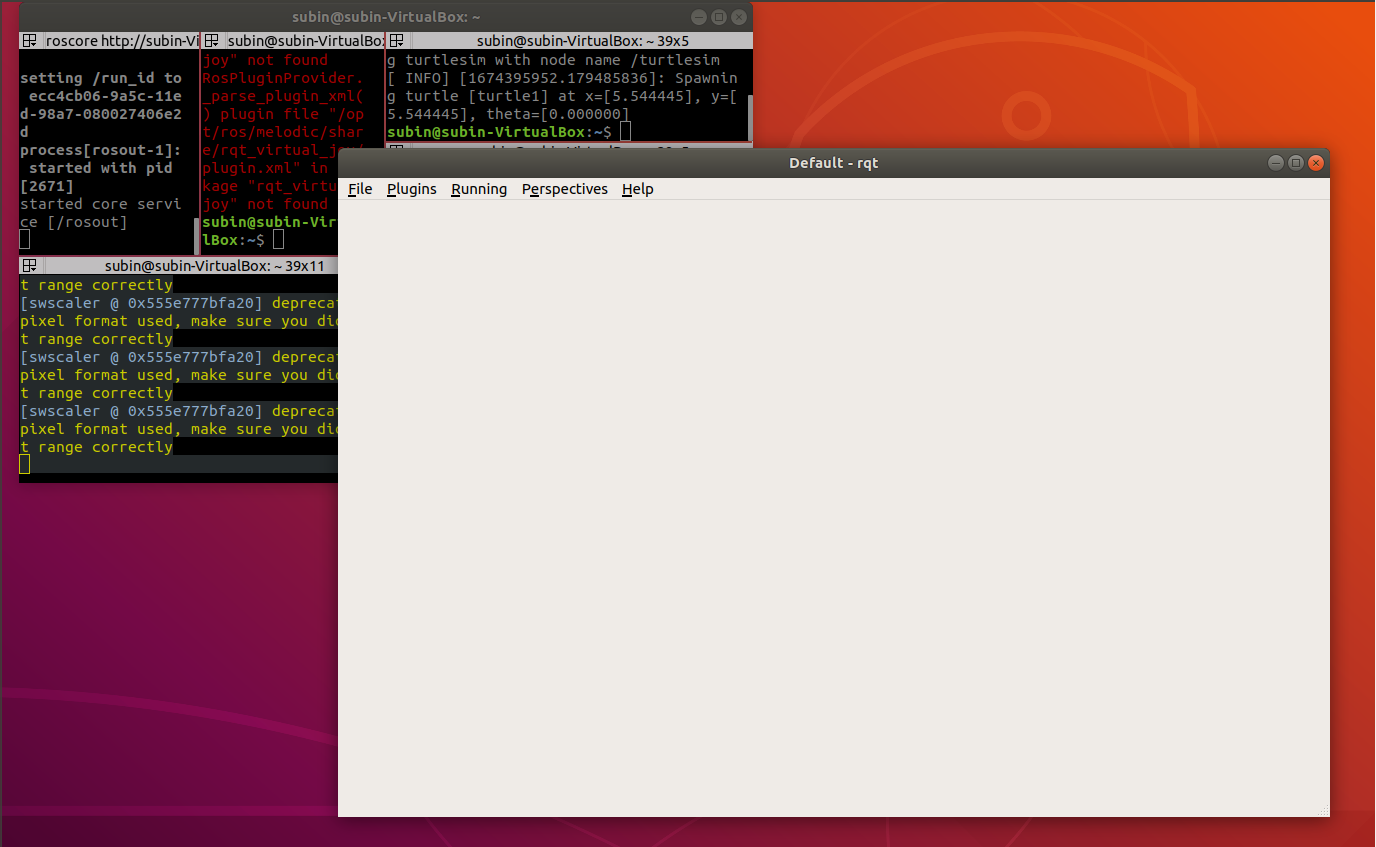
RQT
RQT란?
- 그래픽 인터페이스 개발을 위한 Qt 기반 프레임워크 제공
- 노드와 그들 사이 연결 정보 표시 (rqt_graph)
- 인코더, 전압, 도는 시간이 지남에 따라 변화하는 숫자 플로팅 (rqt_plot)
- 데이터를 메시지 형태로 기록, 재생(rqt_bag)
설치하는 법
sudo apt-get install ros-kinetic-rqt ros-kinetic-rqt-common-plugins
위의 명령어를 terminal에 입력하여 설치
실행하는 법
rqt
위의 명령어를 terminal에 입력하면 실행
실행화면
RQT 실습
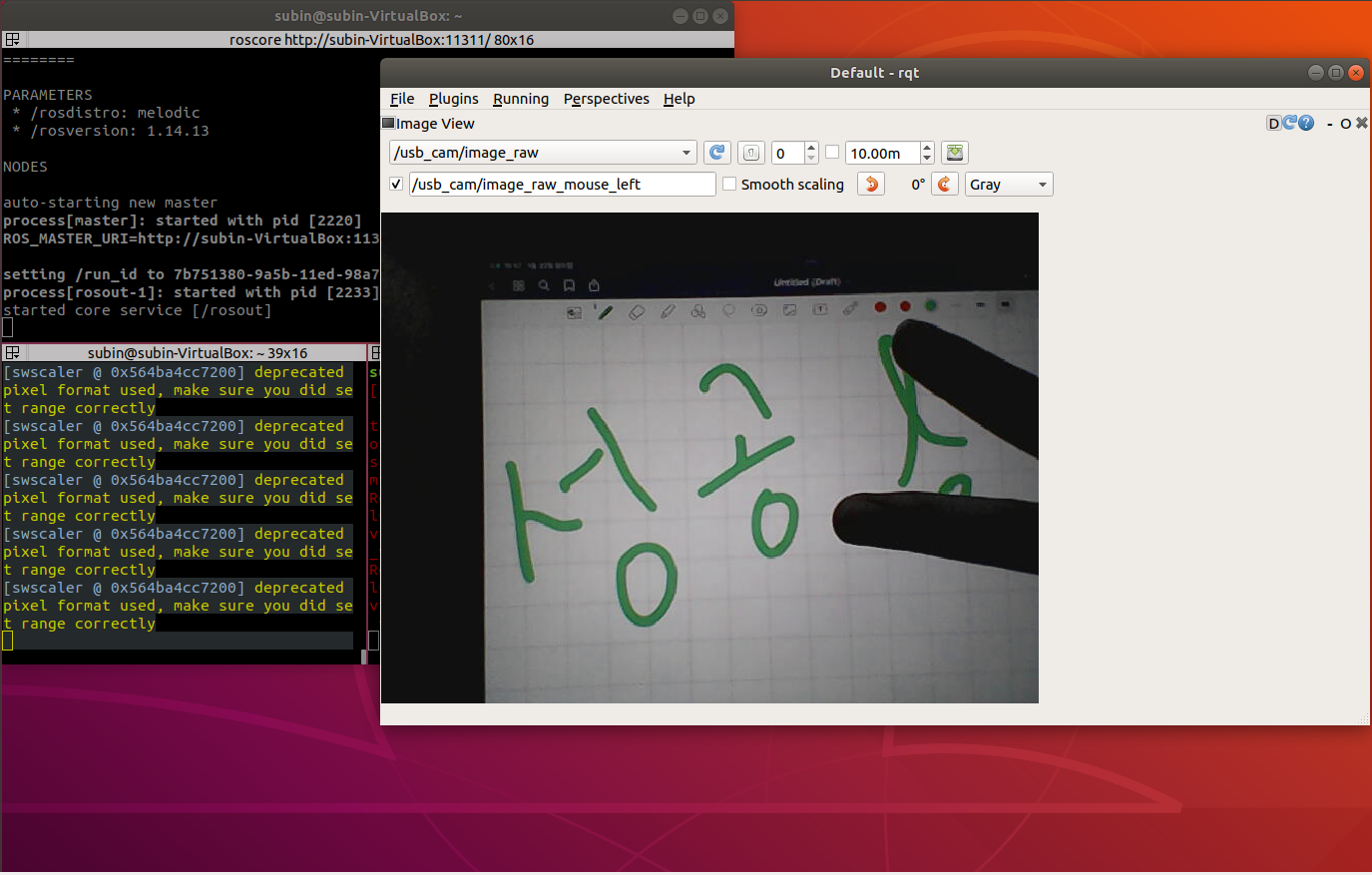
1. rqt_image_view
실행 방법
rosrun uvc_camera uvc_camera_node
ROS Melodic을 설치하면 위와 같이 uvc_camera를 사용할 수 없는데 그 이유는 지원을 만료했기 때문이다.
그러므로 밑에 나와있는 사이트에 들어가 usb_cam을 설치해주고 usb_cam을 이용하여 웹캠을 이용해야한다.
(설치 방법은 밑의 블로그에 잘 나와있다)
[ROS Melodic] USB-CAM & UVC CAMERA
[ROS Melodic] USB-CAM & UVC CAMERA
#[rospack] Error: package 'uvb_camera' not found [rospack] Error: package 'uvb_came...
blog.naver.com
rqt (실행되면 메뉴에서 [Plugins] -> [Visualization] -> [Image View]) 또는 rqt_image_view
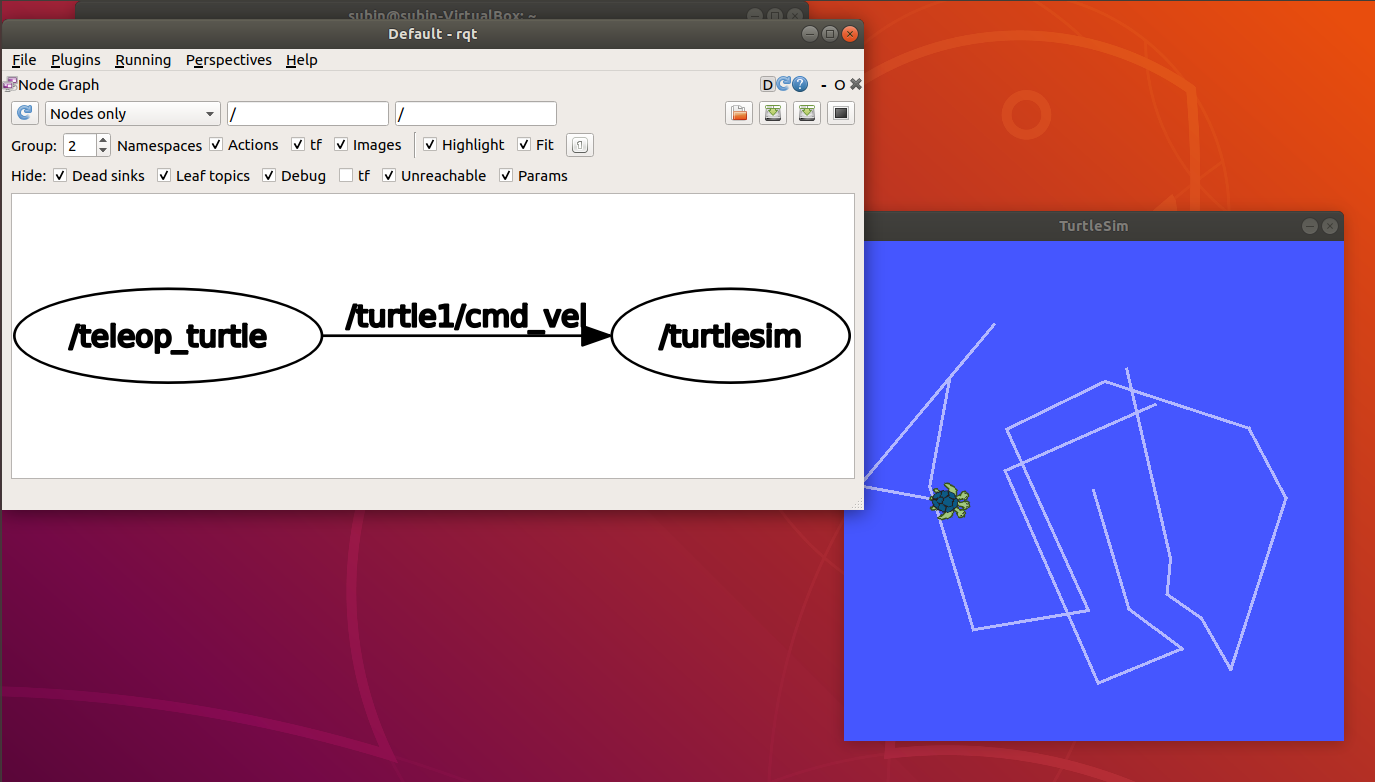
2. rqt_graph
실행 방법
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
rqt (실행되면 메뉴에서 [Plugins] -> [Introspection] -> [Node Graph]) 또는 rqt_graph
위의 명령어들을 terminal에 입력
실행화면
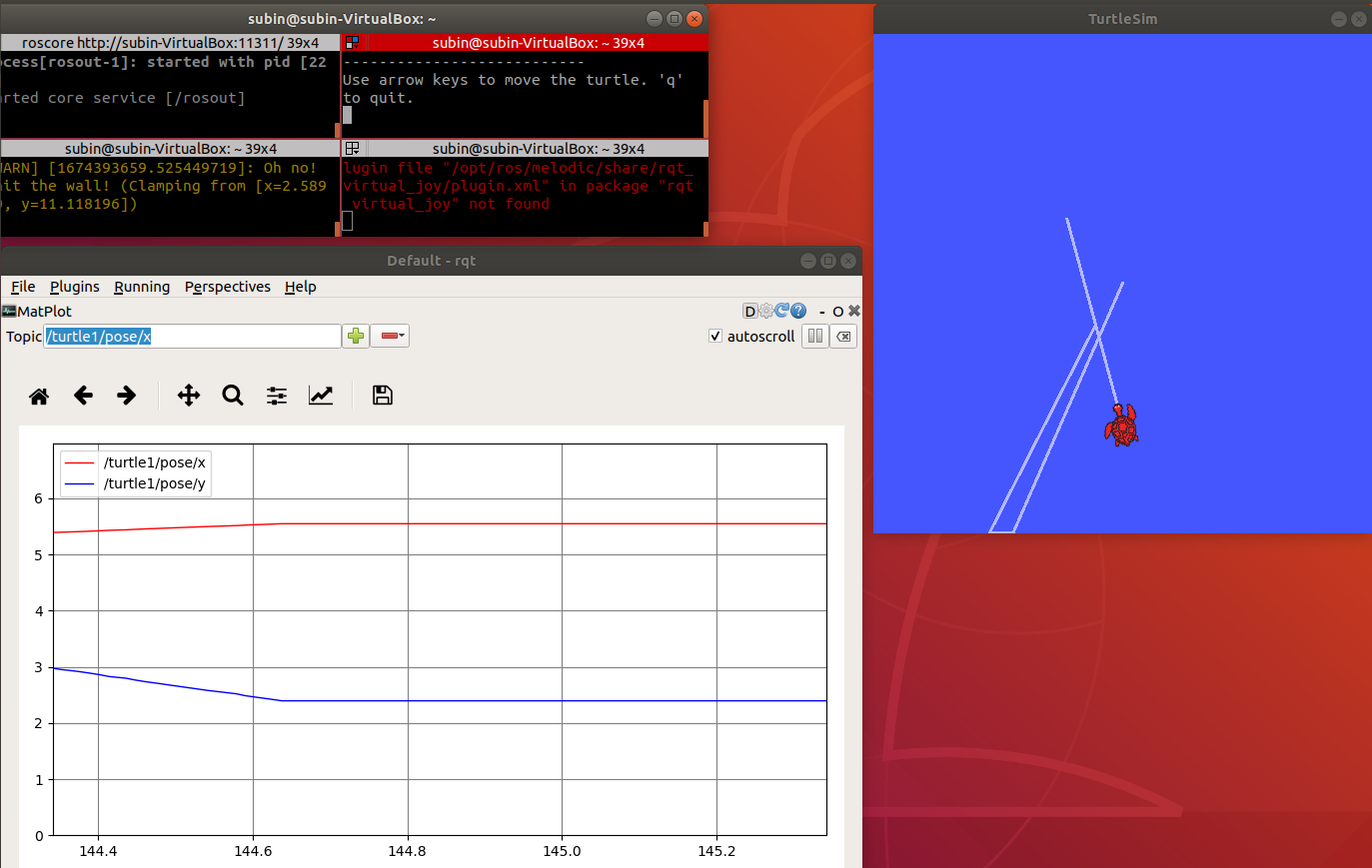
3. rqt_plot
실행 방법
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
rqt (실행되면 메뉴에서 [Plugins] -> [Visualization] -> [Plot]) 또는 rqt_plot /turtle/pose/
실행화면
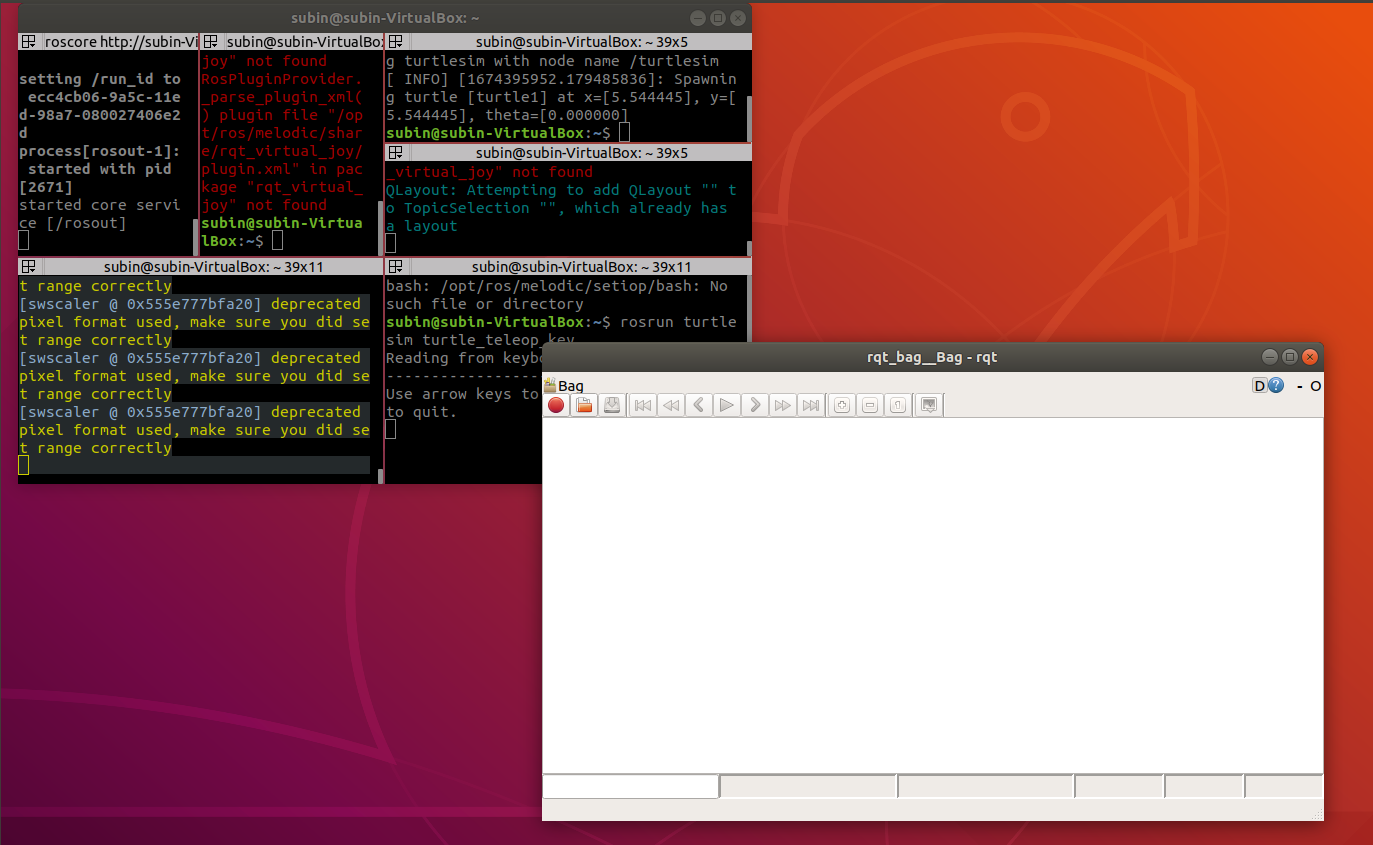
4. rqt_bag
실행 방법
rosrun usb_camera usb_camera_node
rosbag record/image_raw
rqt (실행되면 메뉴에서 [Plugins] -> [Logging] -> [Bag]) 또는 rqt_bag
실행화면
Gazebo
Gazebo란?
- 로봇 개발에 필요한 3차원 시뮬레이션을 위한 로봇, 센서, 환경 모델 등을 지원하고 물리 엔진을 탑재하여 실제와 근사한 결과를 얻을 수 있는 3차원 시뮬레이터
- ROS에서는 Gazebo를 기본 시뮬레이터로 사용하고 있어 ROS와 호완성도 매우 좋음
'FOSCAR-(Autonomous Driving) > ROS 스터디' 카테고리의 다른 글
| [2023 ROS 스터디] 김예진 #2주차 - ROS 용어 및 도구 (0) | 2023.01.23 |
|---|---|
| [2023 ROS 스터디] 정혁제 #2주차 - ROS 용어 및 기초 (3) | 2023.01.22 |
| [2023 ROS 스터디] 변준형 #2주차 - ROS의 컨셉, 명령어, 도구 (0) | 2023.01.22 |
| [2023 ROS 스터디] 선병범 #2주차 - ROS 용어 및 도구 (0) | 2023.01.22 |
| [2023 ROS 스터디] 신의석 #2주차 - ROS의 중요컨셉, 명령어, 도구 (0) | 2023.01.22 |



