이번 4주차 강의는 slam과 내비게이션에 대한 내용이다.
내비게이션은 우리가 실제로 많이 듣는 단어이다 보니 대강 어떤부분인지는 추측이 가지만 slam은 처음 들어봤기에 뭔지는 잘 모르겠지만 내비게이션과 연관되어서 강의에서 설명하는걸 보면 우리가 자율주행자동차 동아리이다 보니 자동차의 gps또는 길찾는 것에 관한것이라고 생각이 들었다.
우선 강의에서는 길찾는 것에 대한 이야기를 했다. 길이라는 것의 정의부터 해서 어떻게 길을 찾는지에 대한 내용이다.
사람이 길찾는 방법에 대한 부분을 로봇이나 자동차도 똑같이 적용해야하는데 이때 필요한 것들이 위치,센싱,지도,경로이다.




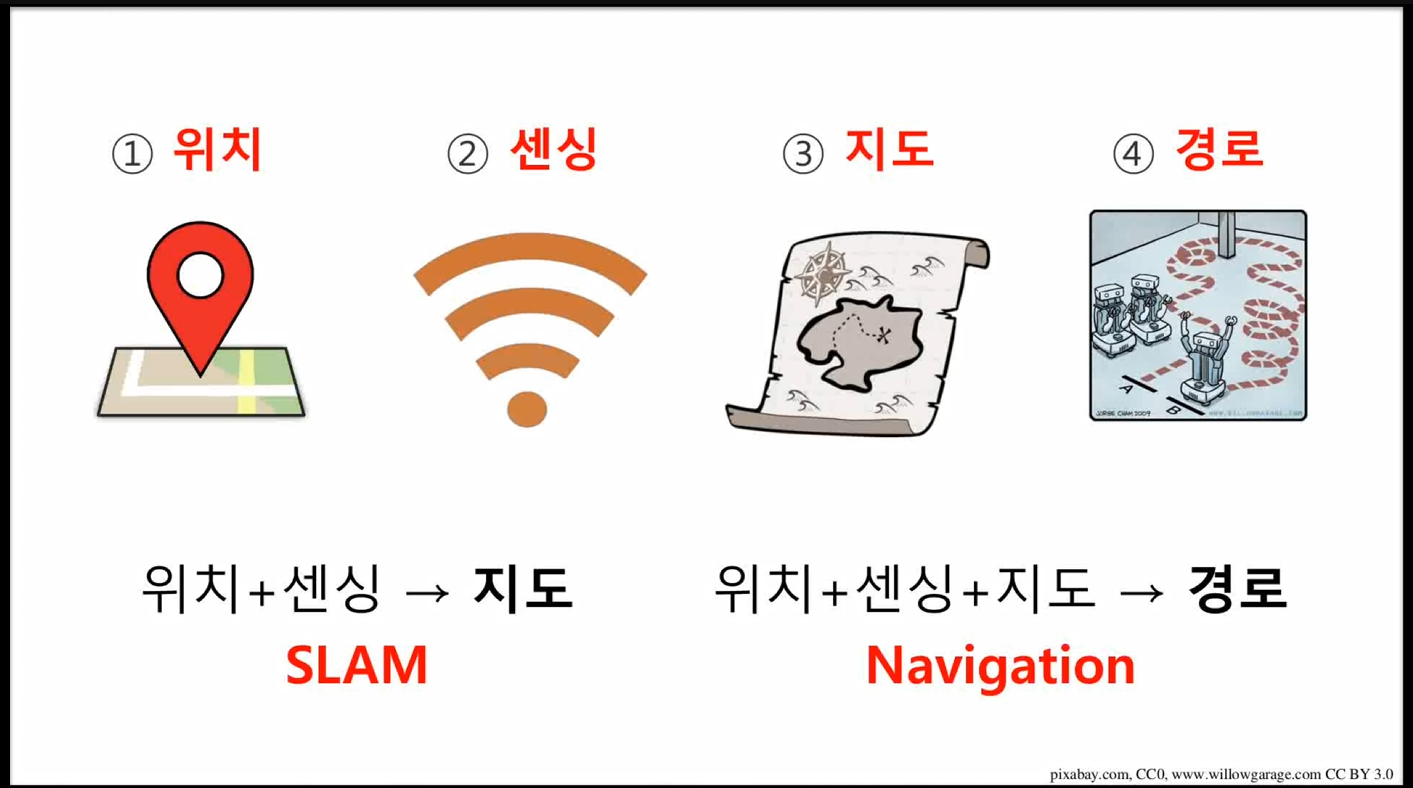
위치와 센싱을 사용하여 로봇은 지도를 만들고 이를 slam이라 칭하고 위치,센싱,지도 3가지를 활용하는 것을 경로를 짜는것이고 이것을 내비게이션이라고 칭하는 것이다.
우리는 지금 ROS강의를 듣는중이고 이러한 것을 코딩하기 위해 OPENSLAM으로 있는 것 중 하나가 gmapping이다. 지금 나는 터틀봇을 보유하고 있는것도 아니고 로봇을 가지고있지 않기에 강의에 영상으로 보며 대체를 했다. 영상을 보면 레이저 스캐너와 카메라를 확인하여 로봇이 지나가면서 레이저 스캐너로 스캔되는 부분은 rviz화면으로 지도처럼 생성이 되는것을 볼 수 있었다.
이다음으로 위치추정(localization)할때 사용하는 2가지 필터가 소개되었다. 칼만 필터와 파티클 필터이다. 칼만 필터는 잡음이 포합되어있는 선형 시스템에서 대상체의 상태를 추적하는 재귀필터이다. 파티클필터는 시행착오법을 시반으로한 시뮬레이션을 통하여 예측하는 기술이다.
이다음으로 내비게이션에 대해 다뤘다. 내비게이션은 로봇의 속도 탐색 영역에서 로봇과 충돌가능한 장애물을 회피하면서 목표점까지 빠르게 다다를 수 있는 속도를 선택하는 방법이라고 한다. 그냥 간단하게 로봇이 앞에 설명했던 것들을 활용하여 목표 지점까지 가장 빠르게 가는 것을 이야기 하는것이다.
강의에서는 터틀봇을 활용하여 slam과 내비게이션을 영상으로 보여주었지만 동아리 활동을 하면서 빠르게 자율주행차 사용하여 이 프로그램들을 돌려보고 싶다.
'FOSCAR-(Autonomous Driving) > ROS 스터디' 카테고리의 다른 글
| [2025 ROS 스터디] 이호휘 #4주차 - SLAM과 내비게이션 (0) | 2025.02.04 |
|---|---|
| [2025 ROS 스터디] 김예찬 #3주차 - ROS 메세지 통신 프로그래밍, roslaunch (0) | 2025.02.03 |
| [2025 ROS 스터디] 신채영 #3주차 - ROS 메세지 통신 프로그래밍, roslaunch (0) | 2025.01.31 |
| [2025 ROS 스터디] 황희찬 #3주차 - ROS 기본 프로그래밍 (0) | 2025.01.31 |
| [2025 ROS 스터디] 이영상 #3주차- ROS 기본 프로그래밍 (0) | 2025.01.31 |



