ROS(Robot Operating System)의 이해와 로봇 생태계의 미래
1. 퍼스널 컴퓨터와 스마트폰의 공통점
퍼스널 컴퓨터와 스마트폰(퍼스널 폰)은 다음과 같은 공통점을 가지고 있습니다.
- 운영체제(OS)를 기반으로 작동
- 애플리케이션 개발 및 설치 가능
- 다양한 하드웨어 모듈의 결합이 가능
- 일반 대중에게 보급된 대중화 제품
- 사용자의 존재와 피드백 가능성
대표적인 OS 예시로는 Windows, 리눅스, iOS, Android, Ubuntu 등이 있습니다.
2. 플랫폼 생태계의 4대 요소
플랫폼 생태계는 다음의 4대 요소로 구성됩니다.
- 하드웨어 모듈
- 운영체제(OS)
- 애플리케이션(App)
- 사용자(User)
과거와 달리 현대의 플랫폼은 다양한 기업이 역할을 나누어 제품을 생산하는 분업화 형태로 발전했습니다.
3. 로봇 분야의 현황과 미래
역사는 반복됩니다. 스마트폰이 컴퓨터의 역사를 따라 발전한 것처럼 로봇 분야 역시 비슷한 발전 경로를 따를 것으로 예상됩니다.
그러나 현재 로봇 분야는 대중화가 이루어지지 않았으며, 모든 과정을 독립적으로 진행하고 있는 상황입니다. 이는 과거 모토로라가 1983년에 출시한 최초 상용 휴대폰과 유사한 초기 단계입니다.
스마트폰의 발전을 이끈 소프트웨어 플랫폼의 특성을 통해 로봇 분야 발전 방향을 예측할 수 있습니다.
- 하드웨어 인터페이스 통합
- 하드웨어 추상화 및 모듈화
- 비용 절감과 성능 향상
- 생태계 분리 및 역할 분담
- 사용자 중심의 서비스 집중
- 사용자 증가 및 피드백을 통한 선순환 구조
현재 로봇 운영체제는 다양한 형태로 존재하며, 대표적으로는 다음과 같은 사례가 있습니다.
- 오픈알티엠(OpenRTM, 일본)
- 오피로스(OPRoS, 한국)
- MSRDS
- 나오키(Naoqi, 유럽) – 페퍼(Pepper) 로봇의 운영체제 (클로즈 소스)
- 로스(ROS, 오픈소스) – 가장 널리 사용됨
- 오로코스(Orocos)
우리나라의 경우, 독자적 플랫폼 구축 시도로 인해 글로벌 경쟁에서 다소 어려움을 겪었습니다. 하지만 기존 플랫폼을 기반으로 한 성공 사례(삼성 및 LG의 안드로이드 활용)를 고려하면 충분한 기회가 있습니다.
4. 로봇 소프트웨어 플랫폼이 가져올 미래
로봇 소프트웨어 플랫폼이 구축될 경우 다음과 같은 변화가 예상됩니다.
- 하드웨어와 소프트웨어 플랫폼 간 명확한 인터페이스 확립
- 모듈형 하드웨어 플랫폼 확대
- 하드웨어 전문 지식 없이도 응용 프로그램 작성 가능
- 다양한 분야 인력의 로봇 산업 참여 가능성 증대
- 사용자 중심의 서비스 개발 강화
- 사용자 그룹 형성 및 피드백 활성화
- 급속한 기술 발전 가능성
이러한 이유로 로봇 소프트웨어 플랫폼의 필요성은 더욱 커지고 있습니다.
5. ROS(Robot Operating System)의 개요와 특징
ROS는 퍼스널 로봇을 위한 메타 운영체제로, 전통적인 운영체제 위에서 동작하는 로봇 소프트웨어 프레임워크입니다. ROS의 주요 목적은 글로벌 수준의 로봇 생태계를 구축하고 개발자 간 협력을 촉진하는 것입니다.
- 다양한 로봇 및 센서 지원 (로봇 90종 이상, 센서 80종 이상)
- 애플리케이션 및 패키지 다수 보유 (5,000개 이상 패키지, 17,000개 위키페이지)
- 우분투 기반 사용 권장, Virtual box 사용 가능(성능상 비추천)
ROS의 핵심 특징
(1) 통신 인프라
- 노드 간 데이터 통신 지원
- 메시지 파싱 및 기록/재생 기능 제공
- 분산 매개 변수 시스템 활용
(2) 로봇 관련 기능
- 표준 메시지 정의
- 기하학 라이브러리(TF)
- 로봇 기술 언어 지원
- 진단 시스템 및 센싱/인식
- 내비게이션
- 매니퓰레이션 라이브러리 제공
(3) 다양한 개발 도구 지원
- Command-Line Tools: 명령어 기반 접근 가능
- Rviz: 센서 데이터 시각화를 위한 3D 시각화 툴
- RQT: GUI 기반의 도구 모음
- Gazebo: ROS와 호환성이 높은 3차원 시뮬레이터 및 물리 엔진 탑재
ROS의 활용을 통해 로봇 분야는 스마트폰이 걸었던 성장 경로를 따라 더욱 빠르게 발전할 것으로 기대됩니다.
ROS NOETIC 설치방법
앞서 일반 윈도우에 ROS설치 시, 충돌이 발생할 수 있기 때문에 Ubuntu에서 설치하는 것을 추천합니다.
Ubuntu를 실행 후 Ctrl+Alt+T로 터미널을 열어 줍니다.
그 후 해당 위키에 들어가 적합한 버전의 ROS 알맞은 순서에 따라 다운받으면 됩니다.
https://wiki.ros.org/noetic/Installation/Ubuntu
noetic/Installation/Ubuntu - ROS Wiki
If you rely on these packages, please support OSRF. These packages are built and hosted on infrastructure maintained and paid for by the Open Source Robotics Foundation, a 501(c)(3) non-profit organization. If OSRF were to receive one penny for each downlo
wiki.ros.org
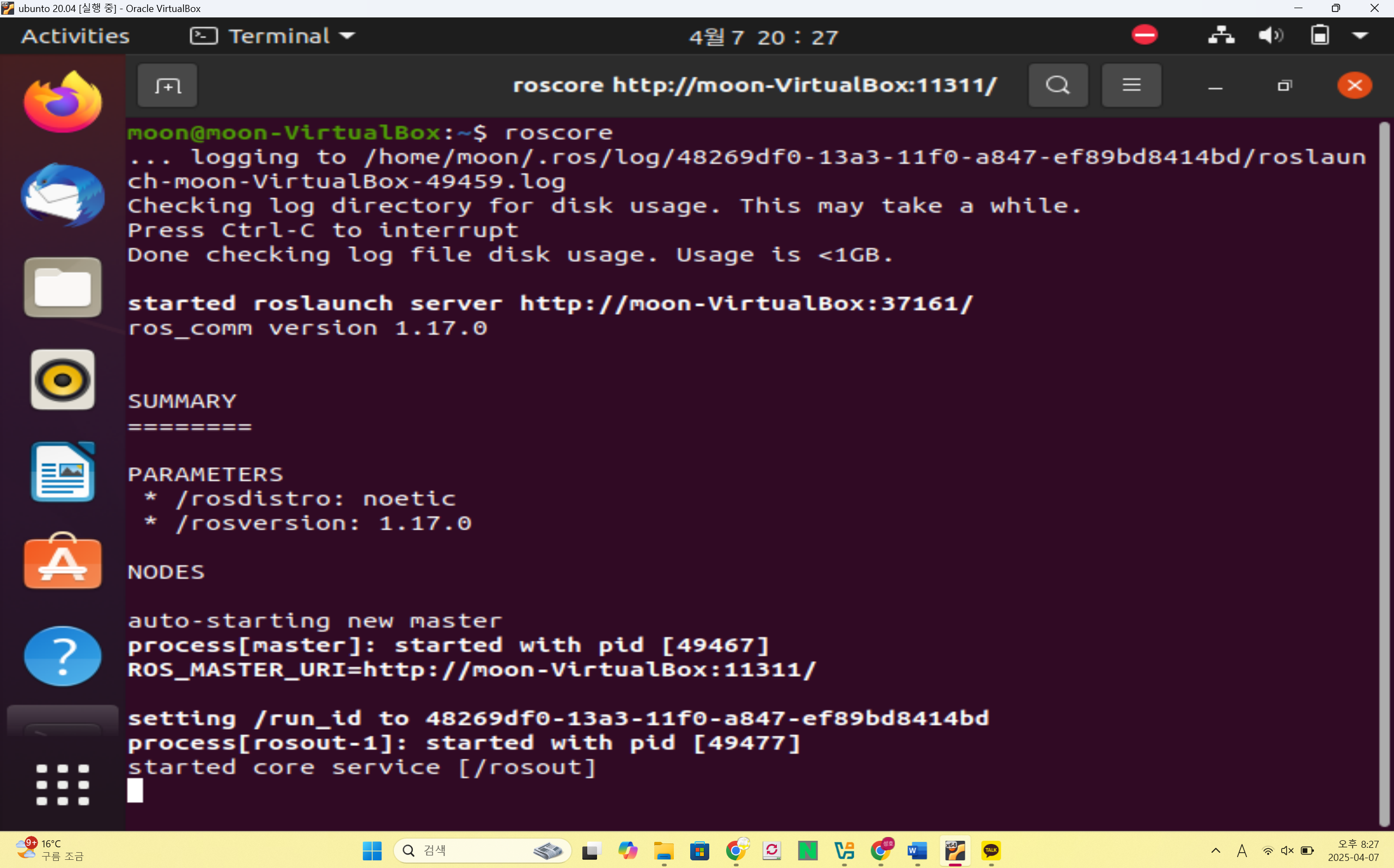
아래 사진은 virtual box를 통한 Ubuntu20.04 버전에서 ROS NOETIC을 설치 후, 터미널에 roscore를 입력한 결과창입니다. 해당 사진처럼 나오면 설치가 완료된 것입니다.
'FOSCAR-(Autonomous Driving) > ROS 스터디' 카테고리의 다른 글
| [2025 ROS 스터디] 조원영 #2주차- ROS 용어, 명령어, 도구 (0) | 2025.04.15 |
|---|---|
| [2025 ROS 스터디] 장우혁 #1주차 - ROS 소개 및 설치 (0) | 2025.04.10 |
| [2025 ROS 스터디] 윤윤지 # 1주차 - ROS 소개 및 설치하기 (0) | 2025.04.07 |
| [2025 ROS 스터디] 한상민 #1주차 - ROS 소개 및 설치 (0) | 2025.04.06 |
| [2025 ROS 스터디] 김승현 #1주차 - ROS 소개 (0) | 2025.04.04 |



