마지막 4주차 스터디에선 SLAM과 내비게이션에 대해 알아보고 실습을 진행해 봤습니다.
*출처
ROS 강의
https://www.youtube.com/playlist?list=PLRG6WP3c31_VIFtFAxSke2NG_DumVZPgw
ROS 강의 pdf 자료
https://github.com/robotpilot/ros-seminar
GitHub - robotpilot/ros-seminar: ROS 수업, 세미나, 강연, 강의 등의 보조 자료
ROS 수업, 세미나, 강연, 강의 등의 보조 자료. Contribute to robotpilot/ros-seminar development by creating an account on GitHub.
github.com
Chapter 11. SLAM과 내비게이션
SLAM으: Simultaneous Localization And Mapping
한국어로는 동시적 위치 추정 및 지도 작성이라는 뜻입니다.
SLAM을 위해서 필요한 기능은 위치, 센싱, 경로가 있고 필요한 정보로는 지도가 있습니다.
로봇에서 각각의 의미를 알아보면
위치: 로봇의 위치 계측 및 추정하는 기능
센싱: 벽, 물체 등의 장애물을 계측하는 기능
경로: 목적지 가지 최적 경로를 계산하고 주행하는 기능
지도: 길과 장애물 정보가 담긴 지도
개념은 여기까지만 담겠습니다. 위 링크를 통해 더 깊이 이해할 수 있습니다.
실습은 가상의 맵과 로봇으로 진행해 봤습니다.
우선, Gazebo를 실행하고

그다음, RVIZ를 실행하면
가상 SLAM을 Gazebo와 함께 구동하면서 지도를 완성해 봤습니다.
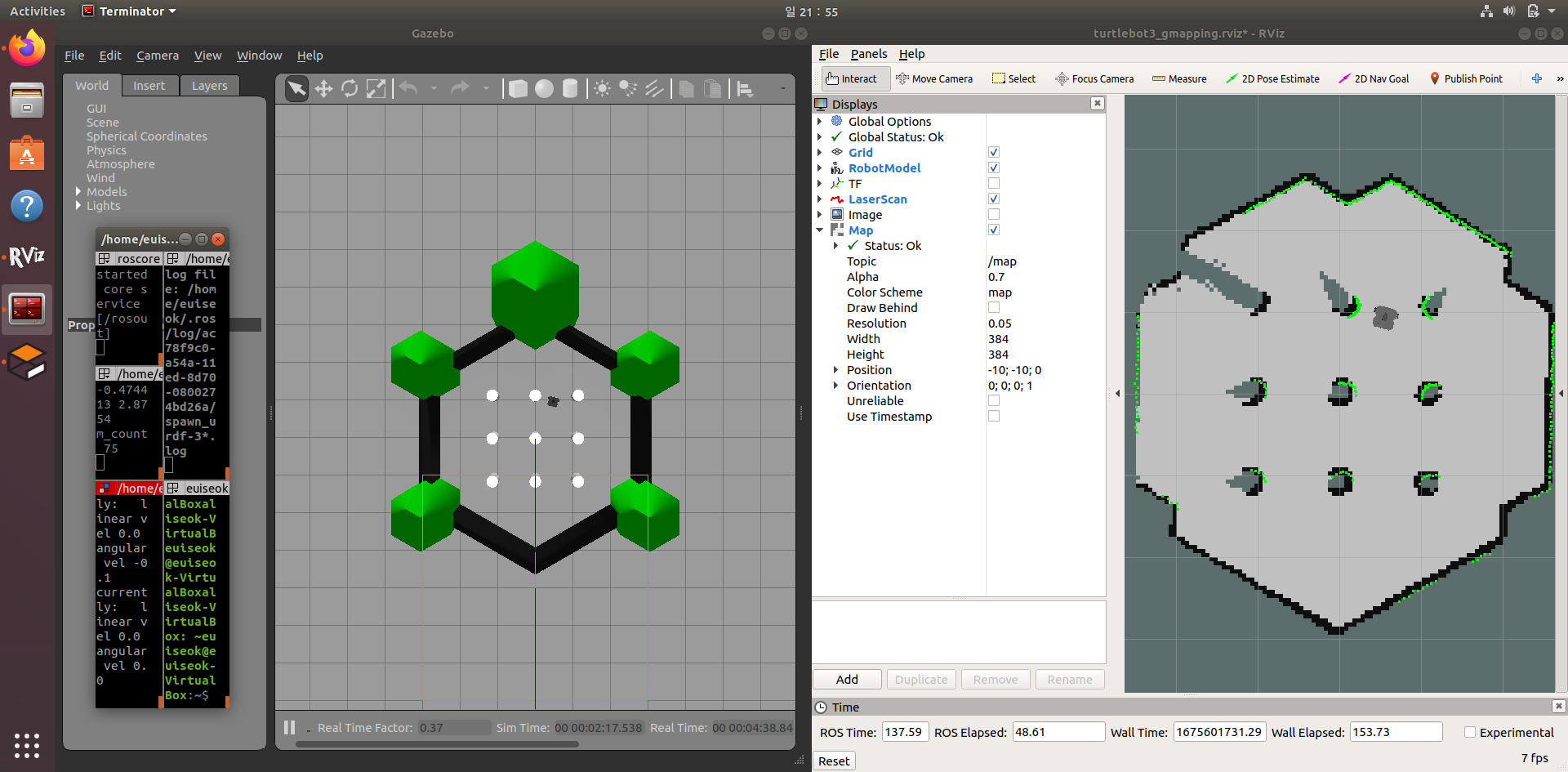
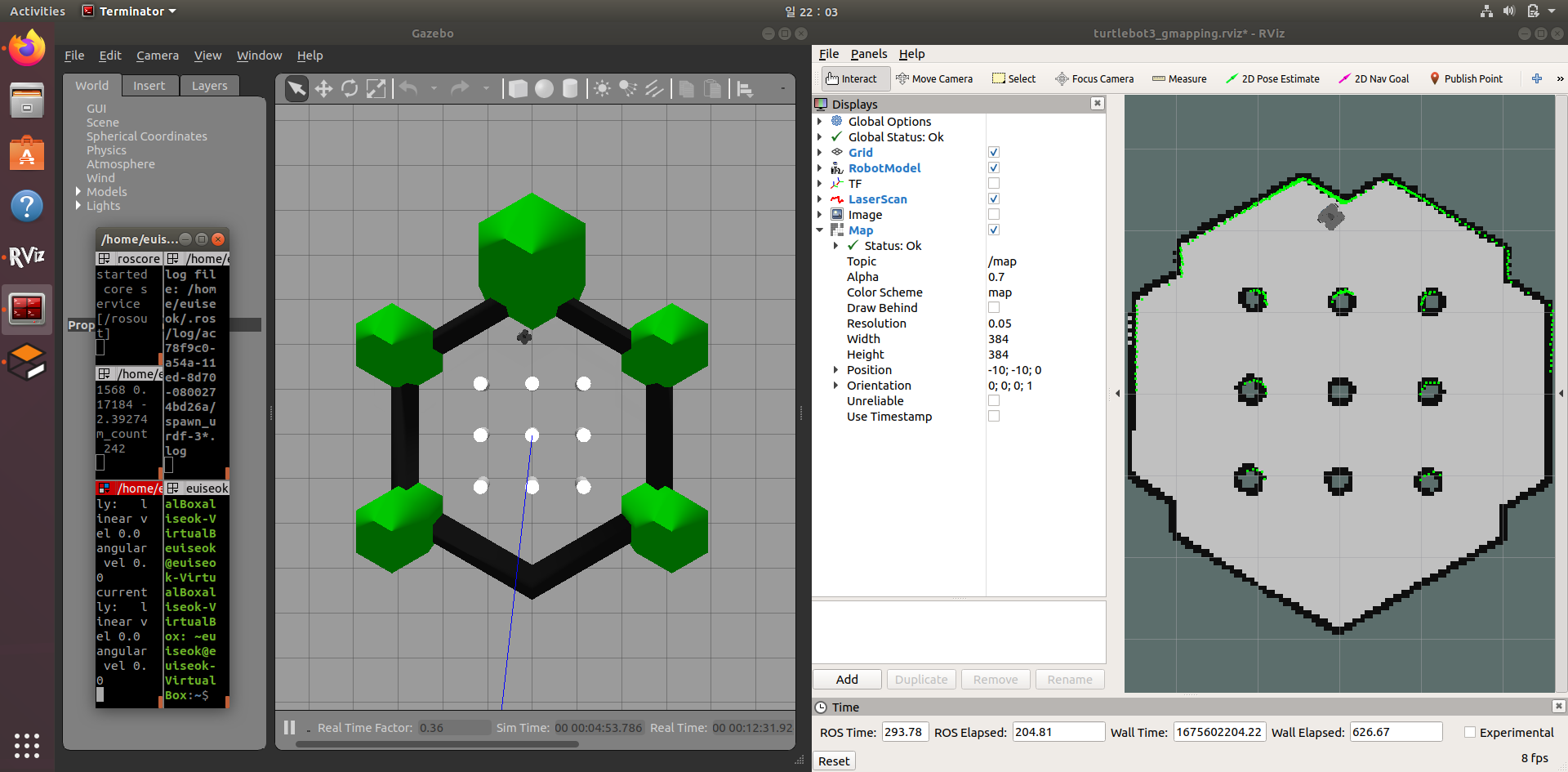
로봇이 맵 곳곳을 돌아다니면서 얻은 정보를 바탕으로 오른쪽 맵이 완성됐습니다.

다음으로는 완성된 맵을 이용 해서 가상 내비게이션을 실습해 봤습니다.
RViz 상에 처음 로봇의 위치가 임의의 위치에 있는데 위치 파악을 빠르게 하기 위해 Gazebo상의 위치와 방향에 가깝게 위치를 변경시깁니다.


위치를 찾는 과장에서 초록색 화살표가 현저히 줄어든 것을 볼 수 있는데 저 화살표가 로봇이 있을 수 있는 위치와 방향을 모두 표시해 놓은 것입니다.
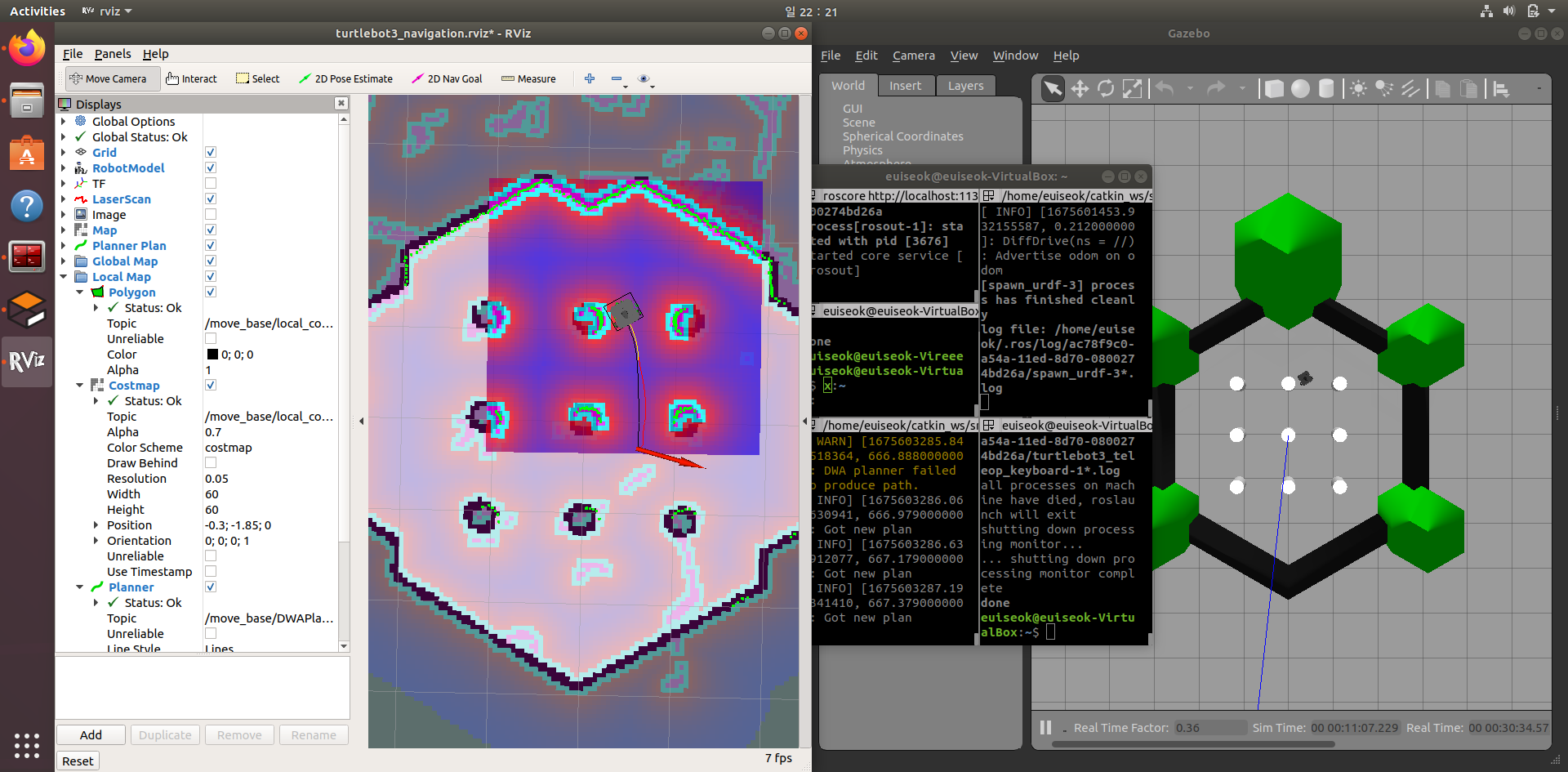
그리고 내비게이션을 이용해 목적지와 바라볼 위치를 설정해 줘서 이동하는 것까지 실습해 봤습니다.
이번 주에 로봇의 다양한 기능들을 시각적으로 이해할 수 있는 시간을 가질 수 있었습니다. 가상의 로봇 말고 실제 로봇을 이용하는 작업도 해보고 싶은 마음이 듭니다.
앞으로 포스카 활동에 이를 경험하게 될 텐데 기대가 됩니다.
이렇게 4주간의 스터디를 마치게 됐습니다.
4주 전과는 전혀 다르다 느낄 정도로 ROS를 알게됐습니다.
하지만 막연하게나마 앞으로 배우고 익혀야할 방대한 ROS의 세계를 느껴서 걱정도 되지만 열심히 해보겠습니다.
'FOSCAR-(Autonomous Driving) > ROS 스터디' 카테고리의 다른 글
| [2023 ROS 스터디] 주승근 #4주차 - SLAM & 네비게이션 (1) | 2023.02.06 |
|---|---|
| [2023 ROS 스터디] 이은선 #4주차 - SLAM과 내비게이션 (0) | 2023.02.05 |
| [2023 ROS 스터디] 박준석 #4주차 - SLAM과 내비게이션 (0) | 2023.02.05 |
| [2023 ROS 스터디] 성동현 #4주차 - SLAM과 내비게이션 (0) | 2023.02.05 |
| [2023 ROS 스터디] 변준형 #4주차 - SLAM과 내비게이션 (0) | 2023.02.05 |



