1. 내비게이션과 구성 요소
#길 찾기에 필요한 것
1) GPS 2) Indoor Positiong Sensor 3) 추측 항법 4) 경로 : 목적까지 최적 경로를 계산하고 주행하는 기능
SLAM - 위치 +센싱 -> 지도
NAVIGATION - 위치 + 센싱 + 지도 -> 경로
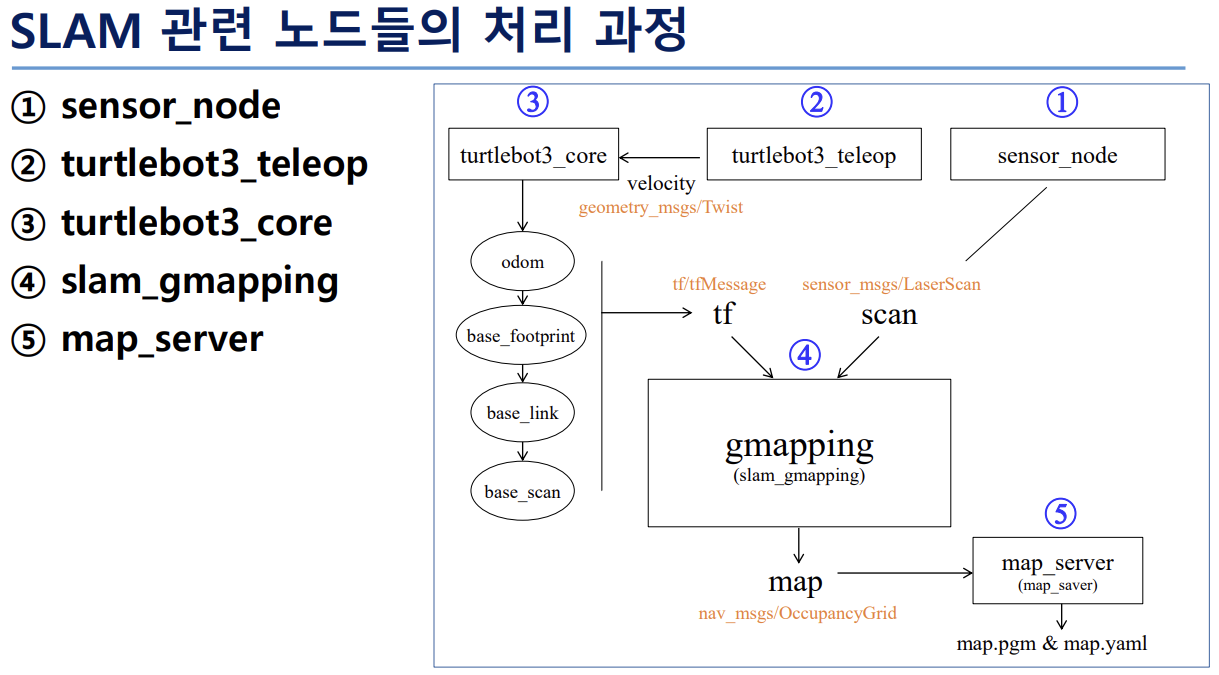
#SLAM을 위해 ROS에서 주어진 패키지 - Gmapping
-OpenSLAM에 공개된 SLAM의 한 종류, ROS에서 패키지로 제공
gmapping - ROS Wiki
melodic noetic Show EOL distros: EOL distros: electric fuerte groovy hydro indigo jade kinetic lunar diamondback: Only showing information from the released package extracted on Unknown. No API documentation available. Please see this page for in
wiki.ros.org
• 저자: G. Grisetti, C. Stachniss, W. Burgard
• 특징: Rao-Blackwellized 파티클 필터, 파티클 수 감소, 그리드 맵
• 하드웨어 제약 사항
• X, Y, Theta 속도 이동 명령
• 주행기록계 (Odometry)
• 계측 센서: 2차 평면 계측 가능 센서( LRF, LiDAR, Kinect, Xtion 등)
• 직사각형 및 원형의 로봇
#실습
참고 자료
기본 설치 패키지이다 .
$ sudo apt install ros-melodic-joy ros-melodic-teleop-twist-joy ros-melodic-teleop-twist-keyboard \
ros-melodic-laser-proc ros-melodic-rgbd-launch ros-melodic-depthimage-to-laserscan ros-melodic-rosserial-arduino ros-melodic-rosserial-python \
ros-melodic-rosserial-server ros-melodic-rosserial-client ros-melodic-rosserial-msgs ros-melodic-amcl \
ros-melodic-map-server ros-melodic-move-base ros-melodic-urdf ros-melodic-xacro ros-melodic-compressed-image-transport \
ros-melodic-rqt-image-view ros-melodic-gmapping ros-melodic-navigation패키지 빌드
$ cd ~/catkin_ws/src
$ git clone https://github.com/ROBOTIS-GIT/turtlebot3.git
$ git clone https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git
$ git clone https://github.com/ROBOTIS-GIT/turtlebot3_simulations.git
$ cd ~/catkin_ws && catkin_make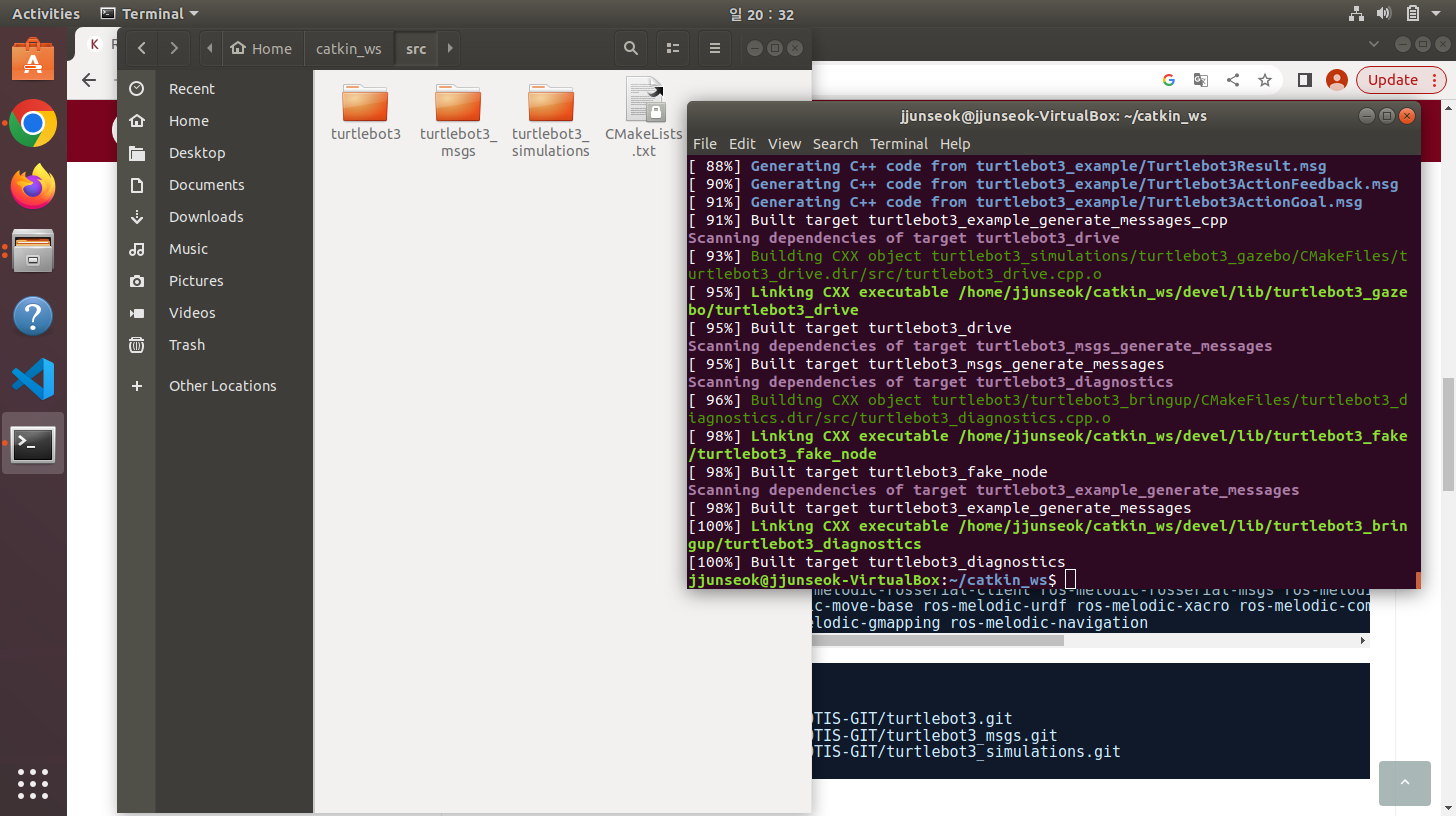
패키지 빌드
$ sudo nano ~/.bashrc방향키를 따라 맨 밑으로 이동 후, 다음과 같은 문장을 복붙해서 넣어준다.
export TURTLEBOT3_MODEL=waffle_pi
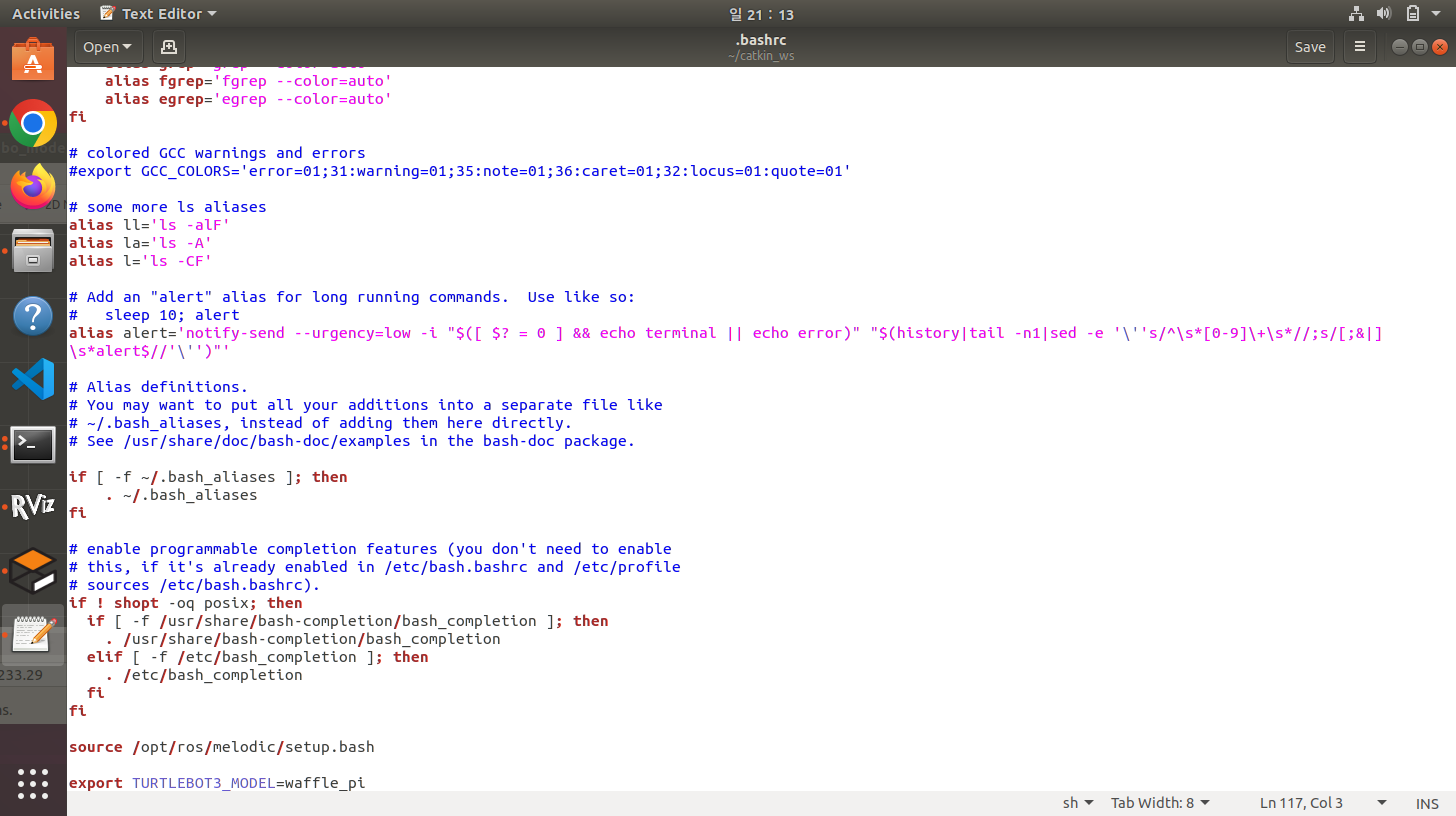
$ source .bashrc
$ source devel/setup.bash실행
$ roslaunch turtlebot3_gazebo turtlebot3_world.launch
$ roslaunch turtlebot3_gazebo turtlebot3_gazebo_rviz.launch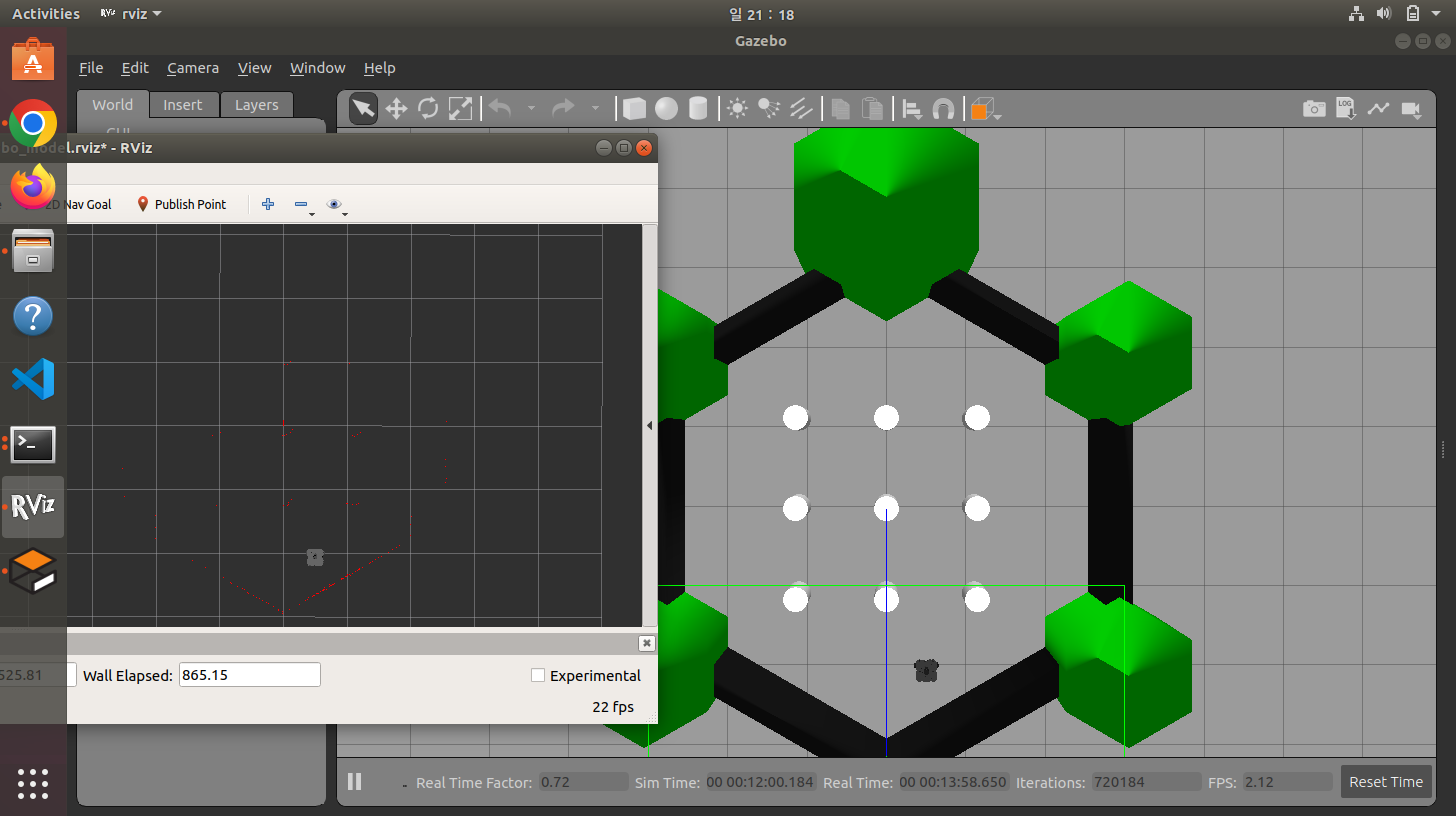
로봇을 움직일 수있다.
$ roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch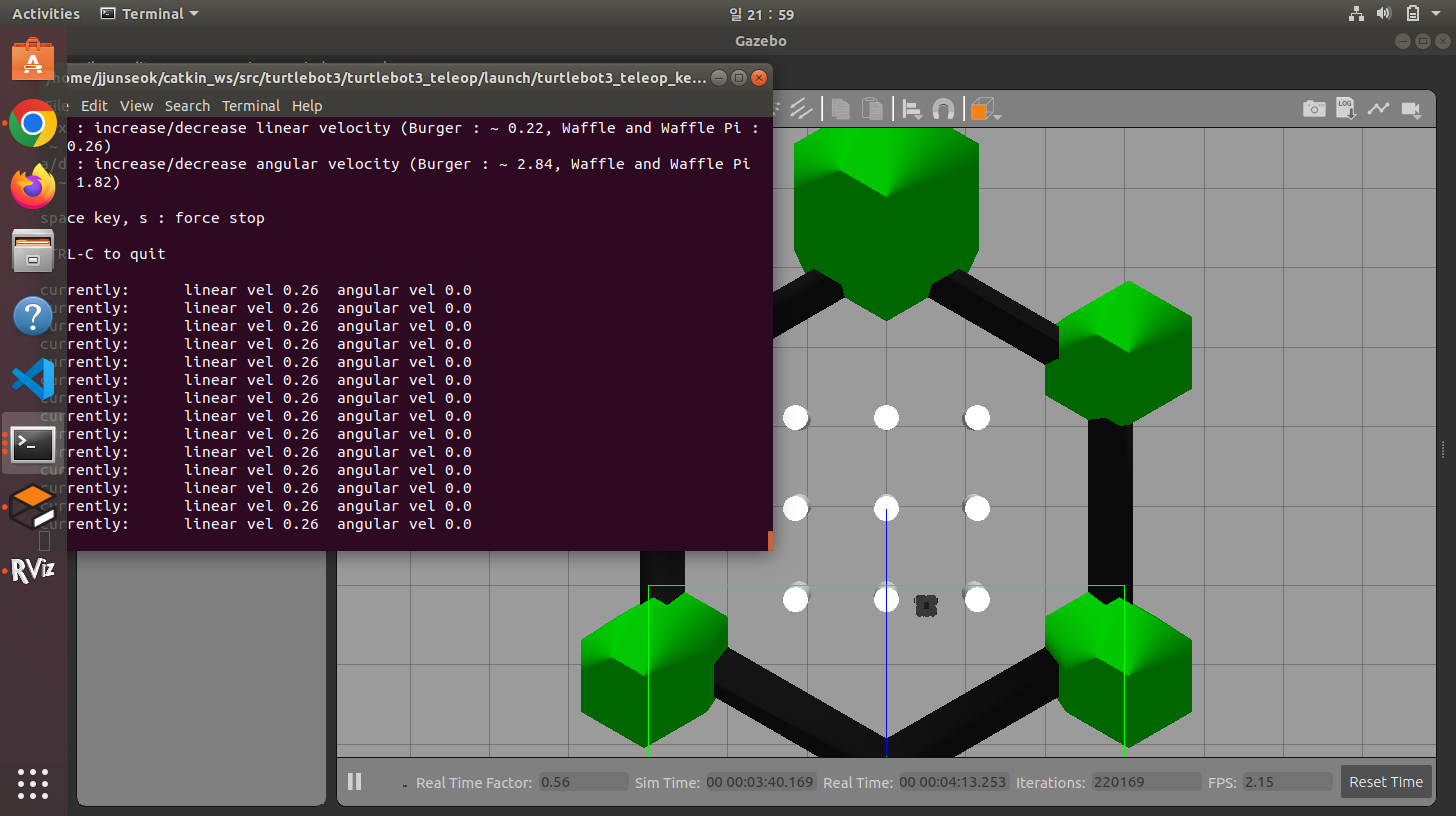
이제는 SLAM을 실행시켜보자
$ roslaunch turtlebot3_slam turtlebot3_slam.launch지도 생성
$ rosrun map_server map_saver -f ~/map네비게이션 실행
$ roslaunch turtlebot3_navigation turtlebot3_navigation.launch map_file:=$HOME/map.yaml
'FOSCAR-(Autonomous Driving) > ROS 스터디' 카테고리의 다른 글
| [2023 ROS 스터디] 이은선 #4주차 - SLAM과 내비게이션 (0) | 2023.02.05 |
|---|---|
| [2023 ROS 스터디] 신의석 #4주차 - SLAM과 내비게이션 (0) | 2023.02.05 |
| [2023 ROS 스터디] 성동현 #4주차 - SLAM과 내비게이션 (0) | 2023.02.05 |
| [2023 ROS 스터디] 변준형 #4주차 - SLAM과 내비게이션 (0) | 2023.02.05 |
| [2023 ROS 스터디] 윤준영 #4주차 - SLAM과 네비게이션 (0) | 2023.02.05 |



