반응형
slam=간단히 말해서 길찾기
영상에서는 turtlebot3를 kinetic버전으로 알려주는데 melodic버전의 다운로드가 필요하다
https://jihnli.tistory.com/3 요분 참고,,
그럼 요런화면이 뜬다
$ roslaunch turtlebot3_gazebo turtlebot3_world.launch
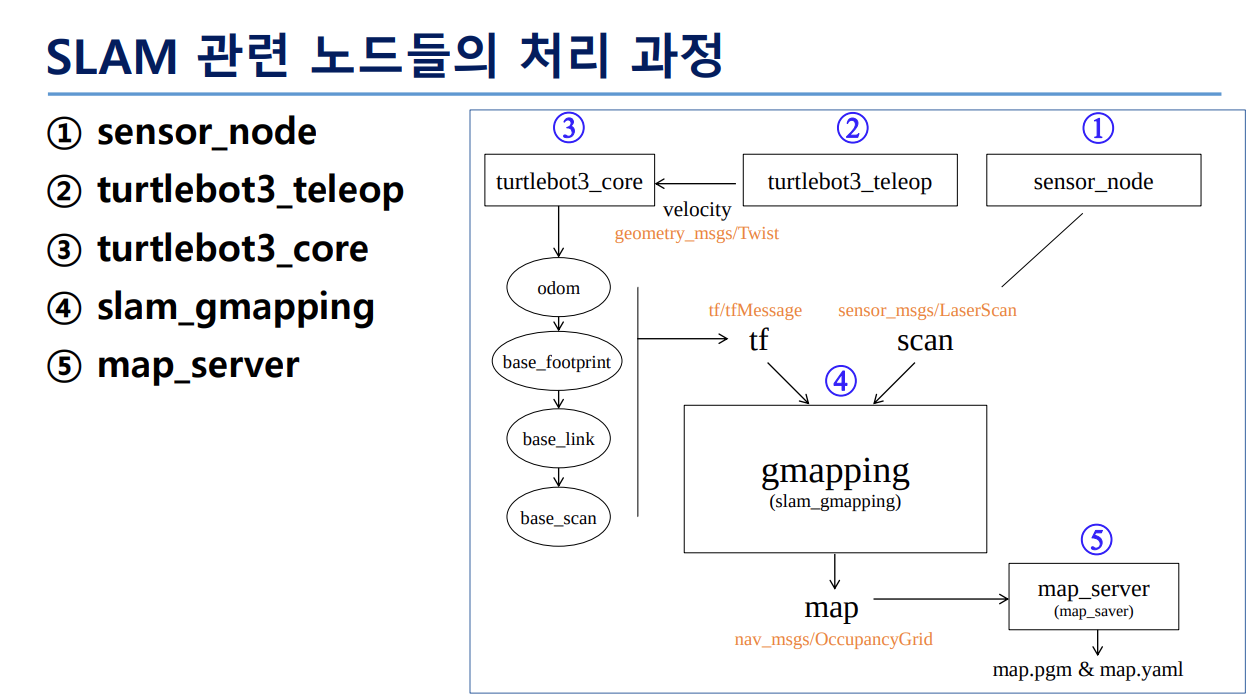
$ roslaunch turtlebot3_slam turtlebot3_slam.launch slam_methods:=gmapping
$ roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
$ rosrun map_server map_saver -f ~/map
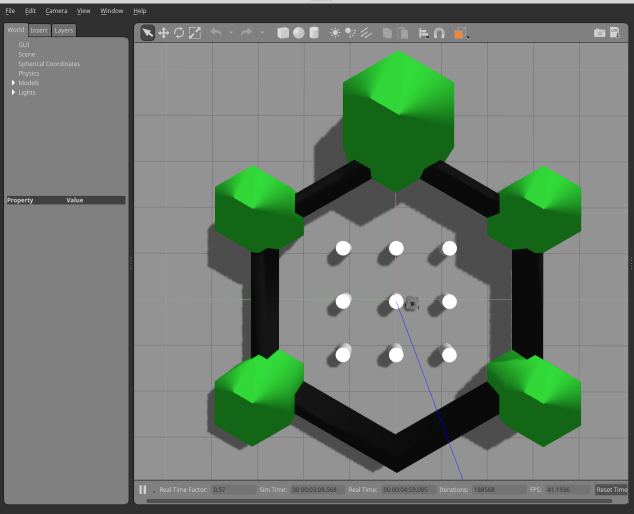
gazebo를 실행시키고
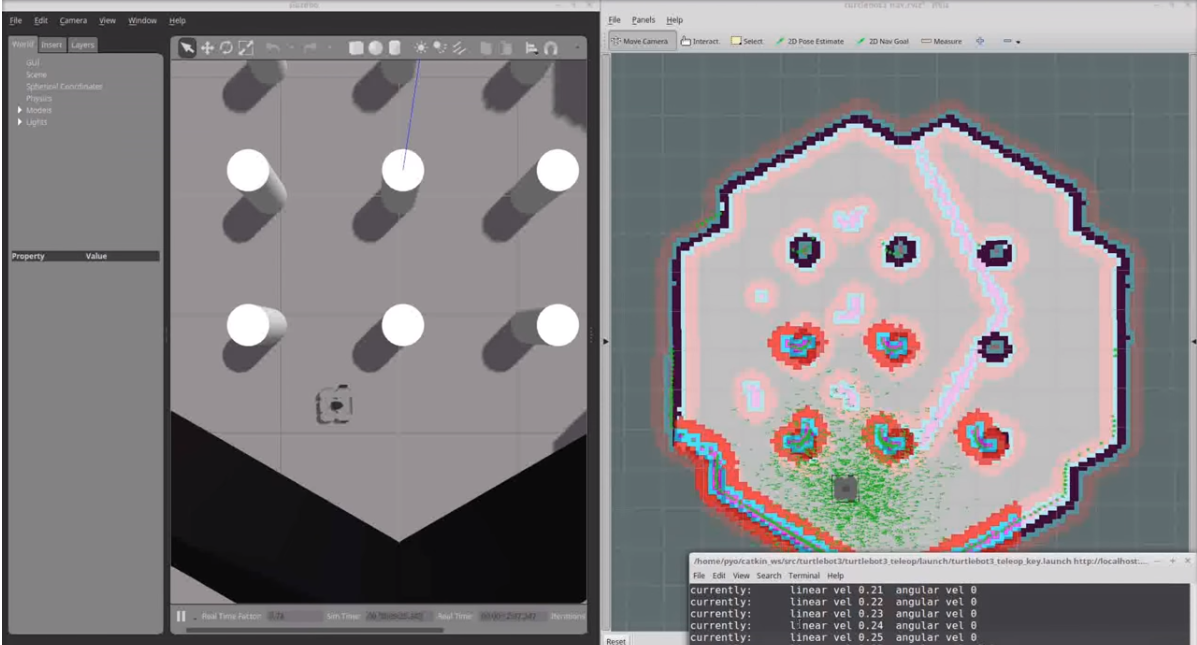
roslaunch turtlebot3_navigation turtlebot3_navigation.launch map_file:=$HOME/map.yaml
네비게이션을 실행시키면
이렇게 실행가능
반응형
'FOSCAR-(Autonomous Driving) > ROS 스터디' 카테고리의 다른 글
| [2023 ROS 스터디] 성동현 #4주차 - SLAM과 내비게이션 (0) | 2023.02.05 |
|---|---|
| [2023 ROS 스터디] 변준형 #4주차 - SLAM과 내비게이션 (0) | 2023.02.05 |
| [2023 ROS 스터디] 조영상 #4주차 - SLAM과 내비게이션 (1) | 2023.02.05 |
| [2023 ROS 스터디] 오현민 #4주차 - SLAM과 내비게이션 (0) | 2023.02.04 |
| [2023 ROS 스터디] 홍선재 #4주차 - SLAM과 내비게이션 (0) | 2023.02.03 |



