패키지 설치를 할 때 영상에서는 kinetic으로 되어있어서 설치가 안 될 것이다...아마?
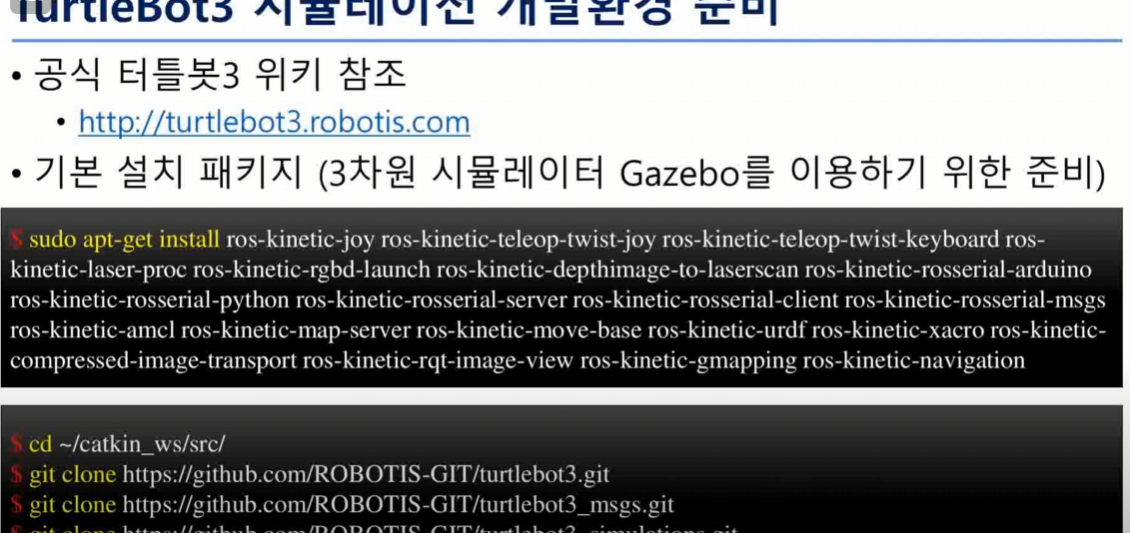
본인이 모두 멜로딕으로 바꿔놓았다.
sudo apt install ros-melodic-joy ros-melodic-teleop-twist-joy ros-melodic-teleop-twist-keyboard ros-melodic-laser-proc ros-melodic-rgbd-launch ros-melodic-depthimage-to-laserscan ros-melodic-rosserial-arduino ros-melodic-rosserial-python ros-melodic-rosserial-server ros-melodic-rosserial-client ros-melodic-rosserial-msgs ros-melodic-amcl ros-melodic-map-server ros-melodic-move-base ros-melodic-urdf ros-melodic-xacro ros-melodic-compressed-image-transport ros-melodic-rqt-image-view ros-melodic-gmapping ros-melodic-navigation
이걸로 쳐야함

패키지 빌드를 성공적으로 했다. 이런거 할 때마다 오류가 뜰까봐 너무 무섭다 진짜
이 녀석은 사람을 피곤하게 만드는 재주가 있다.
export TURTLEBOT3_MODEL = waffle_pi
roslaunch turtlebot3_gazebo turtlebot3_world.launch
순서대로 입력해주면
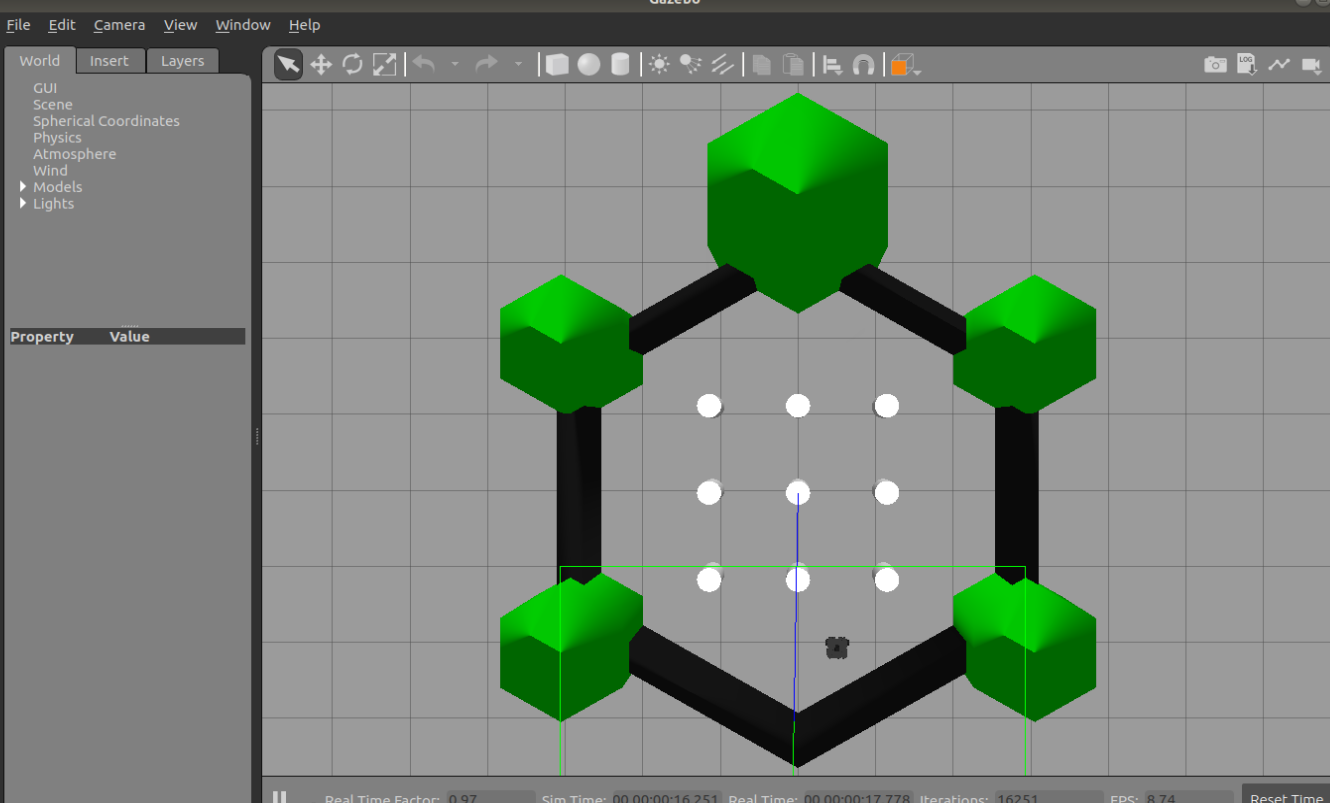
이런 모습이 나온다. 하지만...
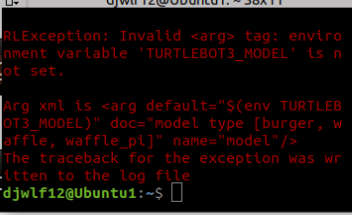
teleop 코드를 쳤더니 저런 오류가 나온다.
해결법을 알려드리겠습니다~!

이 화면 들어가셔서 ctrl+H 를 눌러주세요
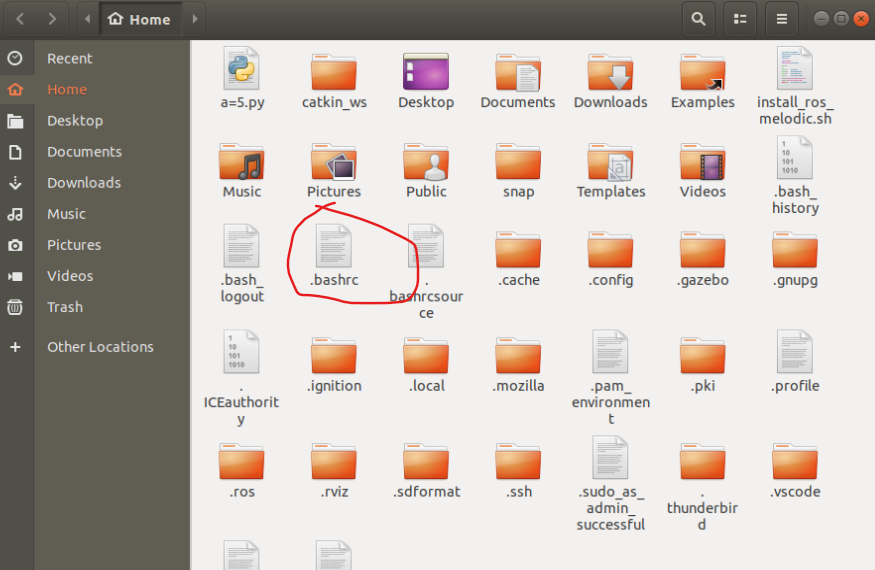
그러면 숨겨진 파일이 나오는데 저 파일중 .bashrc 를 눌러주세요
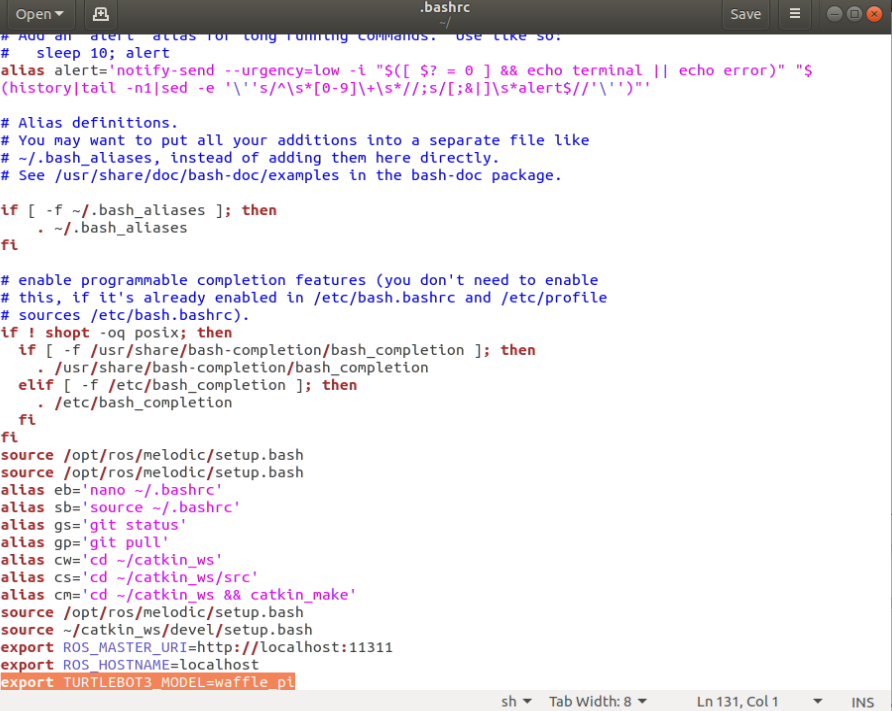
그러면 이런 파일이 뜨는데 맨 밑으로 내리셔서 저 와플파이 추가하시고 다시 돌리시면 해결될겁니다.
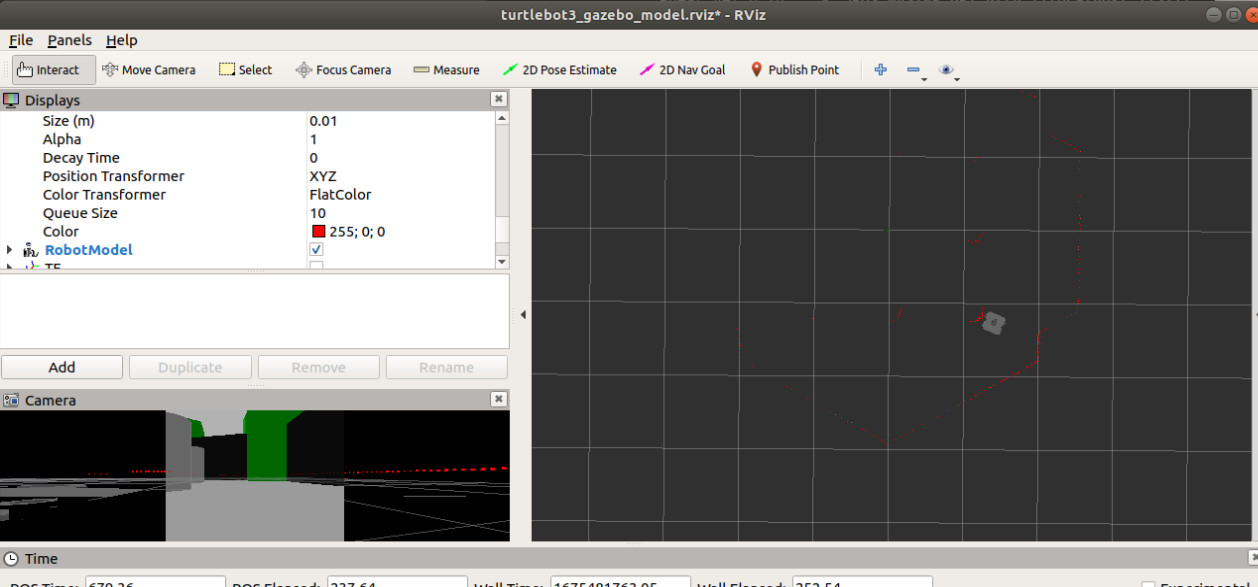
로봇이 상당이 제멋대로 움직인다.
rviz에서 카메라를 체크하면 좌측 하단에 가상 카메라도 구현할 수 있다.
포인트 클라우드는 왜 없는지 모르겠다...
그러면 이제 slam 까지 켜보자

slam 을 키고 로봇을 움직이니 맵을 그리는 것을 볼 수 있었다.

rosrun map_server map_saver -f ~/map
위 코드를 입력해서 맵 출력도 가능하다!!

네비게이션을 켜서 원하는 위치로 정렬시킬 수 있다.
이로서 4주간의 과정이 완료됐다.
지금의 상태로는 걸음마도 떼지 못한 그저 한 번 일어서본 어린 아이와 같은 상태라고 생각한다.
여러번의 연습을 통해서 걷고 뛰고 점프하는 아이가 되기까지 시행착오가 많겠지만 배울게 많아서 즐겁다.
어렵지만 할 수 있다.
꼭 포스카에 국토부 대상을 안겨주리라!
'FOSCAR-(Autonomous Driving) > ROS 스터디' 카테고리의 다른 글
| [2023 ROS 스터디] 윤준영 #4주차 - SLAM과 네비게이션 (0) | 2023.02.05 |
|---|---|
| [2023 ROS 스터디] 조영상 #4주차 - SLAM과 내비게이션 (1) | 2023.02.05 |
| [2023 ROS 스터디] 홍선재 #4주차 - SLAM과 내비게이션 (0) | 2023.02.03 |
| [2023 ROS 스터디] 김동훈 #4주차 - SLAM과 내비게이션 (0) | 2023.02.03 |
| [2023 ROS 스터디] 조성준 #4주차 - SLAM과 내비게이션 (1) | 2023.02.03 |



