Ch 04 중요 컨셉
1.용어 정리
1)Node: 최소 단위의 실행 가능한 프로세서
2)Package: 하나 이상의 노드, 노드 실행을 위한 정보 등을 묶어 놓은 것
3)Message: 변수형태로 메시지를 통해 노드간의 데이터를 주고받게 된다.
4)Topic: 단방향, 연속성을 가진 통신방법
-publisher (메시지를 보냄)
-subscriber (메시지를 받음)

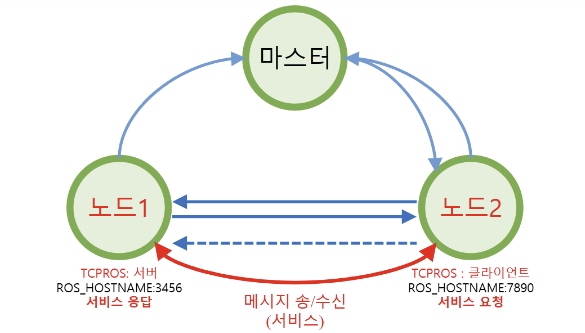
5)Service : 양방향, 일회성
클라이언트 ->서버 (서비스 요청)
서버 -> 서버 (서비스 응답)
6)Action : 중간결과에 대한 피드백을 전달
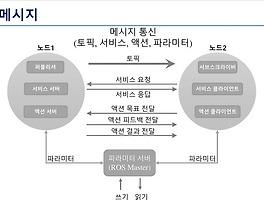
2.메시지 통신 개념
1) 마스터 구동(roscore)

2) 서브스크라이버 노드 구동(rosrun)

3) 퍼블리셔 노드 구동

4) 퍼블리셔 정보 알림

5) 퍼블리셔 노드에 접속 요청

6) 서브스크라이버 노드에 접속 응답

7) TCP 접속

8) 메시지 전송

9) 서비스 요청 및 응답
*네임
:노드 이름이 정해져 있지만 그 이름을 바꿔서 실행 시키고 싶을때, 메시지를 보내는데 이름을 바꿔서 보내고 싶을 때 사용

Ch 05 명령어
1. 명령어 정리(중요도 3 기준으로 정)
1)셸 명령어
roscd : ros+cd(changes directory), 지정한 ROS 패키지의 디렉터리로 이동
2)실행 명령어
roscore : ros+core, master(ROS 네임 서비스), rosout(로그 기록), parameter server(파라미터 관리)
rosrun : ros + run, 노드 실행
roslaunch : ros + launch, 노드를 여러 개 실행 및 실행 옵션 설정
3)정보 명령어
rostopic : ros+topic (ROS 토픽 정보 확인)
rosservice : ros + service (ROS 서비스 정보 확인)
rosnode : ros + node (ROS 노드 정보 확인)
rosparam : ros + param(parameter) (ROS 파라미터 정보 확인, 수정)
rosbag : ros + bag (ROS 메시지 기록, 재생)
4)ROS catkin 명령어
catkin_create_pkg : 패키지 자동 생성
catkin_make : 캐킨 빌드 시스템에 기반을 둔 빌드
5)ROS 패키지 명령어
rospack : ros + pack (ROS 패키지와 관련된 정보 보기)
Ch 06 도구
1.ROS의 다양한 개발 도구
1) Command-Line Tools
-GUI 없이 ROS에서 제공되는 명령어로만 로봇 엑세스 및 거의 모든 ROS 기능 소화
2)RViz
-강력한 3D 시각화를 제공
-레이저, 카메라 등의 센서 데이터를 시각화
-로봇 외형과 계획된 동작을 표현

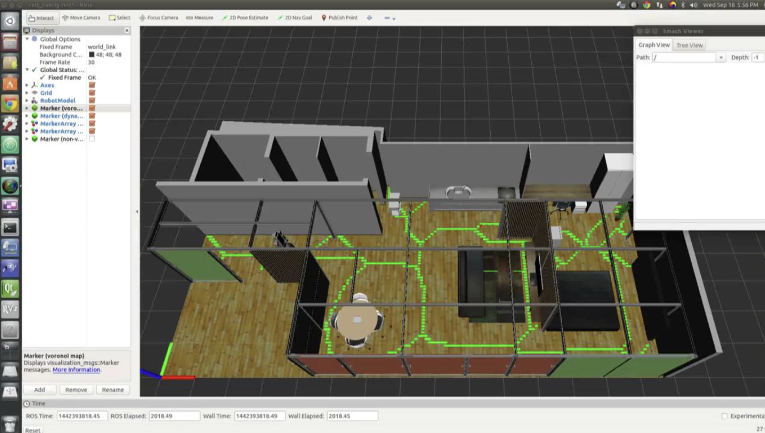

!Rviz를 이용하면 센서 및 로봇 관련 데이터 시각화가 매우 간단해진다!
3)RQT
-그래픽 인터페이스 개발을 위한 Qt 기반 프레임 워크 제공
-노드와 그들 사이의 연결 정보 표시
-인코더, 전압 또는 시간이 지남에 따라 변화하는 숫자를 플로팅
-데이터를 메시지 형태로 기록하고 재생

!RQT를 이용하면 GUI 형태로 ROS 이용 가능, GUI 툴 제작이 간단!
4)Gazebo
-물리 엔진을 탑재, 로봇, 센서, 환경 모델 등을 지원, 3차원 시뮬레이터
-ROS와의 높은 호완성
!시뮬레이션이 필요할때 ROS와 연동하기 쉬움!
'FOSCAR-(Autonomous Driving) > ROS 스터디' 카테고리의 다른 글
| [2025 ROS 스터디] 윤윤지 #3주차-ROS 기본 프로그래밍 (0) | 2025.05.01 |
|---|---|
| [2025 ROS 스터디] 장우혁 #2주차 - ROS 중요 컨셉, 명령어, 도구 (1) | 2025.05.01 |
| [2025 ROS 스터디] 전예림 #3주차 - ROS 기본 프로그래밍 (0) | 2025.05.01 |
| [2025 ROS 스터디] 한상민 #2주차-ROS의 중요 컨셉, 명령어, 도구 (0) | 2025.04.30 |
| [2025 ROS 스터디] 전예림 #2주차 - 중요 컨셉, 명령어, 도구 (0) | 2025.04.30 |