Ch 07 ROS 기본 프로그래밍
1.ROS 프로그래밍 전 알아둬야 할 사항
1) 표준단위 : SI 단위 사용
2) 좌표 표현 방식 : x(foward), y(left), z(up), 오른손 법칙(시계 반대 방향이 (+))
3) 프로그래밍 규칙

2.Topic 작성
1) 패키지 생성
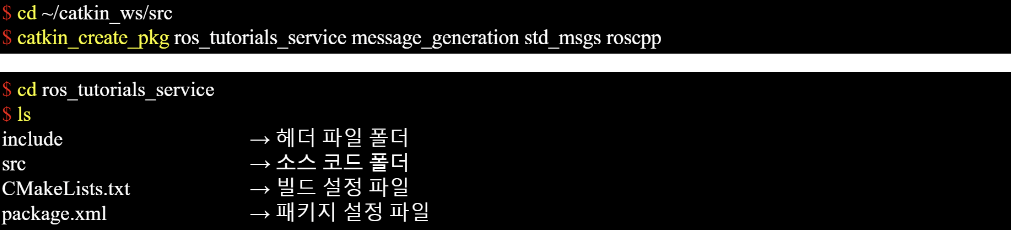
cd: change directory 라는 기본 명령어
~:틸드(홈폴더)

2) 패키지 설정 파일 수정

3) 빌드 설정 파일 수정

4)메시지 파일 작성

5) 퍼블리셔 노드 작성

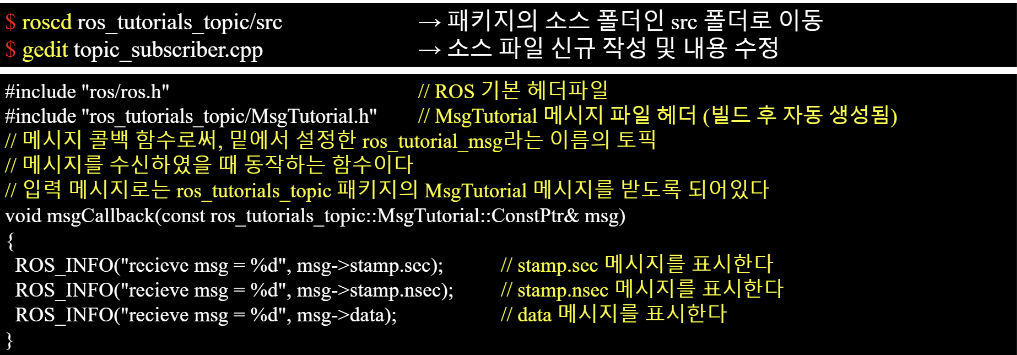
6) 서브스크라이버 노드 작성
7) ROS 노드 빌드

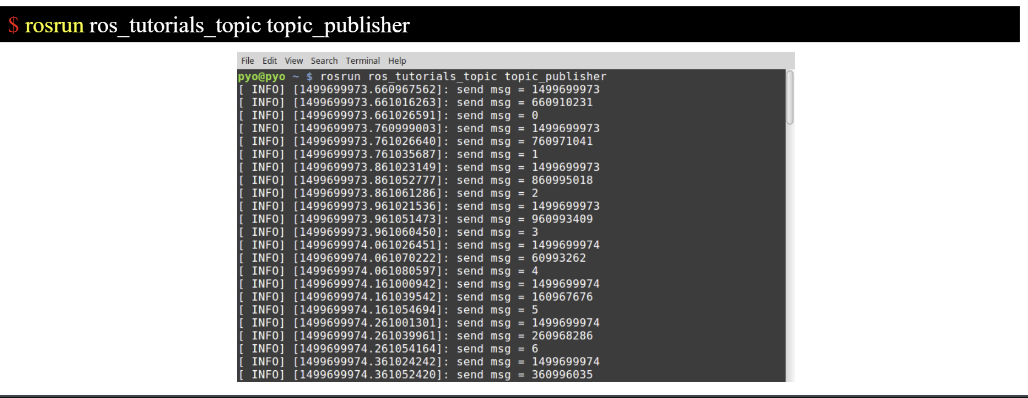
8) 퍼블리셔 실행
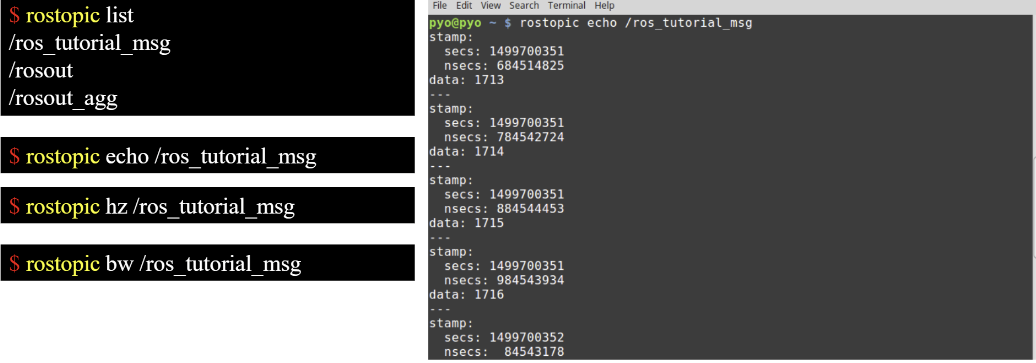
*rostopic
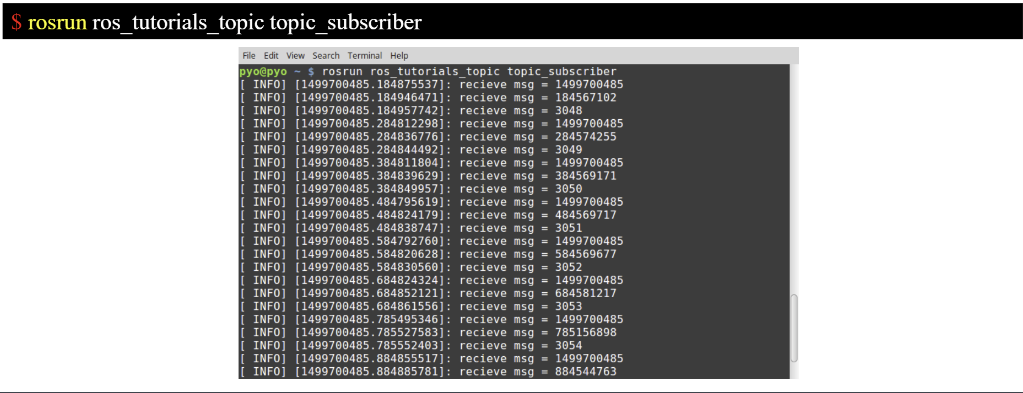
9) 서브스크라이버 실행
10) 실행된 노드들의 통신 상태 확인

3.Service 작성
1) 패키지 생성
2) 패키지 설정 파일 수정

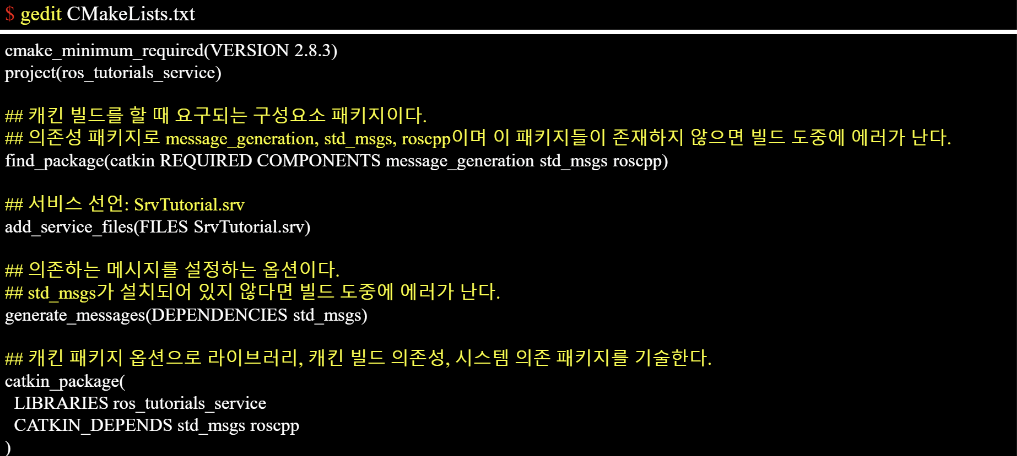
3) 빌드 설정 파일 수정
4) 서비스 파일 작성


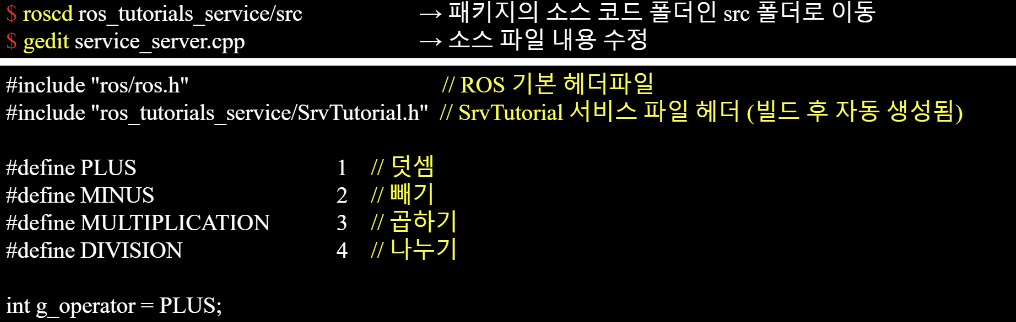
5) 서비스 서버 노드 작성

6) 서비스 클라이언트 노드 작성

7) ROS 노드 빌드

8) 서비스 서버 실행

9) 서비스 클라이언트 실행

4.Parameter
1) 파라미터를 활용한 노드 작성
2) 노드 빌드 및 실행

3) 매개변수 목록 보기

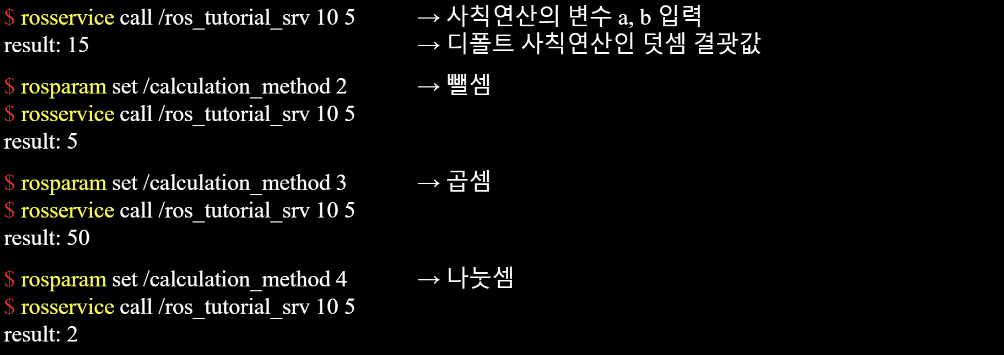
4) 파라미터 사용 예
5. roslaunch 사용법
rosrun:하나의 노드를 실행하는 명령어
roslaunch:하나 이상의 정해진 노드를 실행
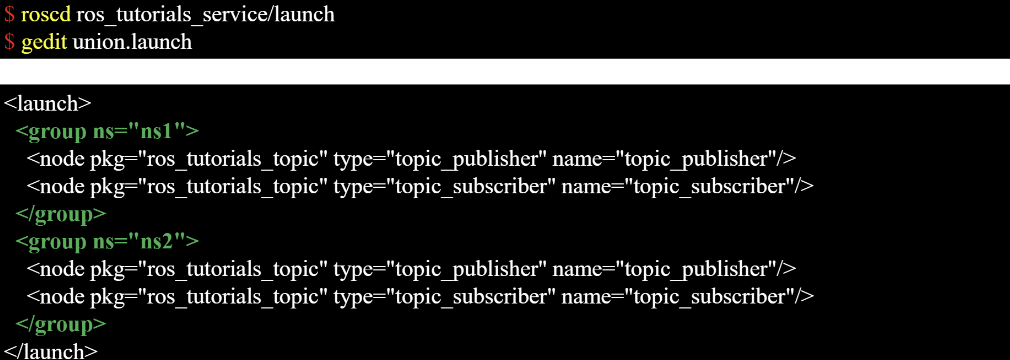
1) roslaunch 의 활용



퍼블리쉬 노드와 서브스크라이버 노드를 각각 두 개씩 구동하여 서로 별도의 메시지 통신하게 한다라는 것은 실행되는 노드의 이름만 변경되었을 뿐 사용되는 메시지의 이름을 바꿔주지 않았다.
->union.launch를 수정하기

'FOSCAR-(Autonomous Driving) > ROS 스터디' 카테고리의 다른 글
| [2025 ROS 스터디] <문승주> #2주차-<ROS의 중요컨셉, 명령어, 도구> (0) | 2025.05.02 |
|---|---|
| [2025 ROS 스터디] 장우혁 #3주차-ROS 기본 프로그래밍 (0) | 2025.05.01 |
| [2025 ROS 스터디] 장우혁 #2주차 - ROS 중요 컨셉, 명령어, 도구 (1) | 2025.05.01 |
| [2025 ROS 스터디] 윤윤지 #2주차-중요 컨셉, 명령어, 도구 (0) | 2025.05.01 |
| [2025 ROS 스터디] 전예림 #3주차 - ROS 기본 프로그래밍 (0) | 2025.05.01 |



