반응형
'길 찾기' 과정에서 필요한 것은 4가지가 있다.
- 위치
- 센싱
- 지도
- 경로
- 위치 + 센싱 ==> 지도 (SLAM)
- 위치 + 센싱 + 지도 ==> 경로 (NAVIGATION)
실습을 하며 알아본다.
강의 영상에서 나온 대로 패키지와 기본 툴을 설치하고
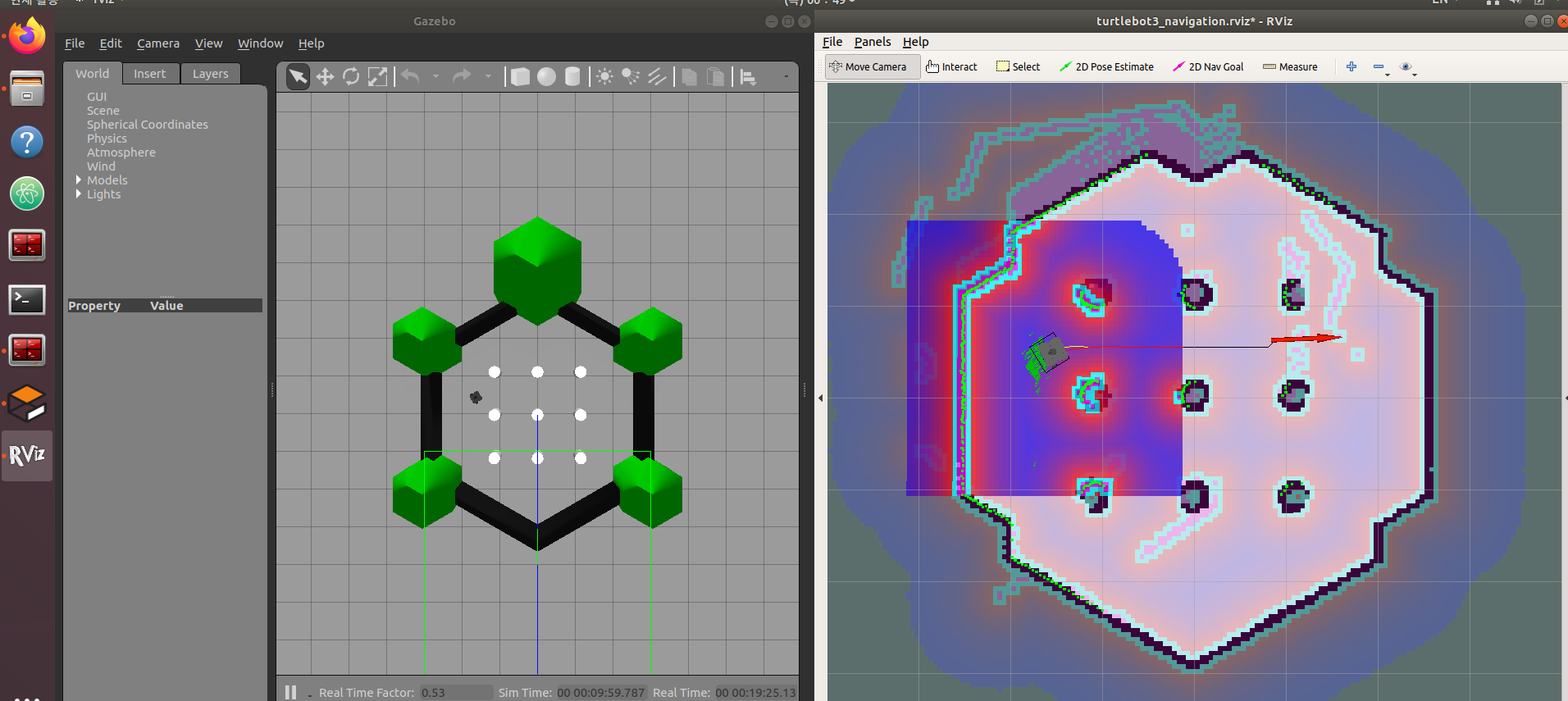
gazebo 시뮬레이터에서 놀아본다. rviz도 실행하고, teleop로 조종할 수도 있다.
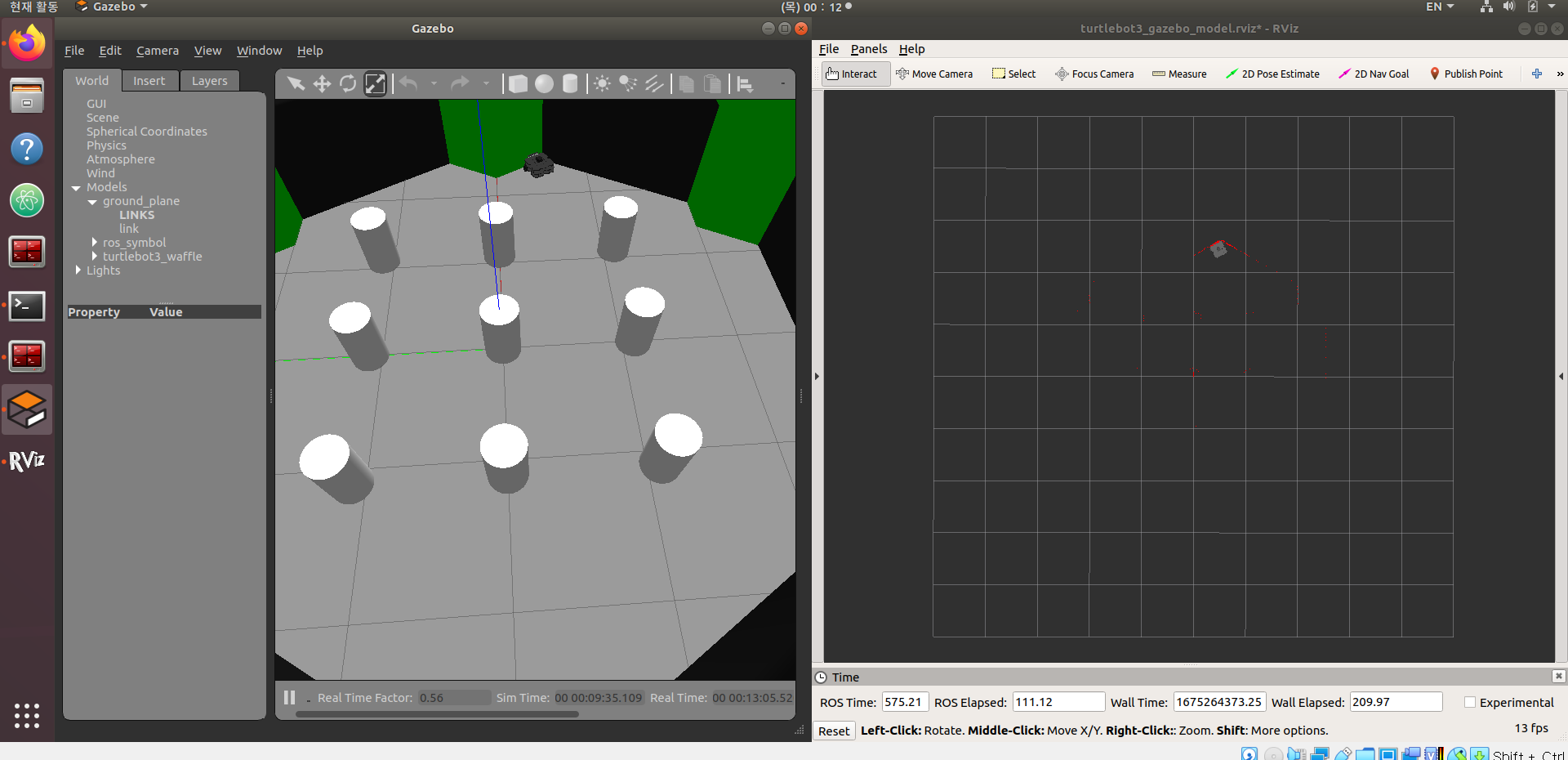
SLAM 도 같이 실행시켜서 귀여운 TURTLEBOT 친구를 맵을 모두 구경시켜준다.
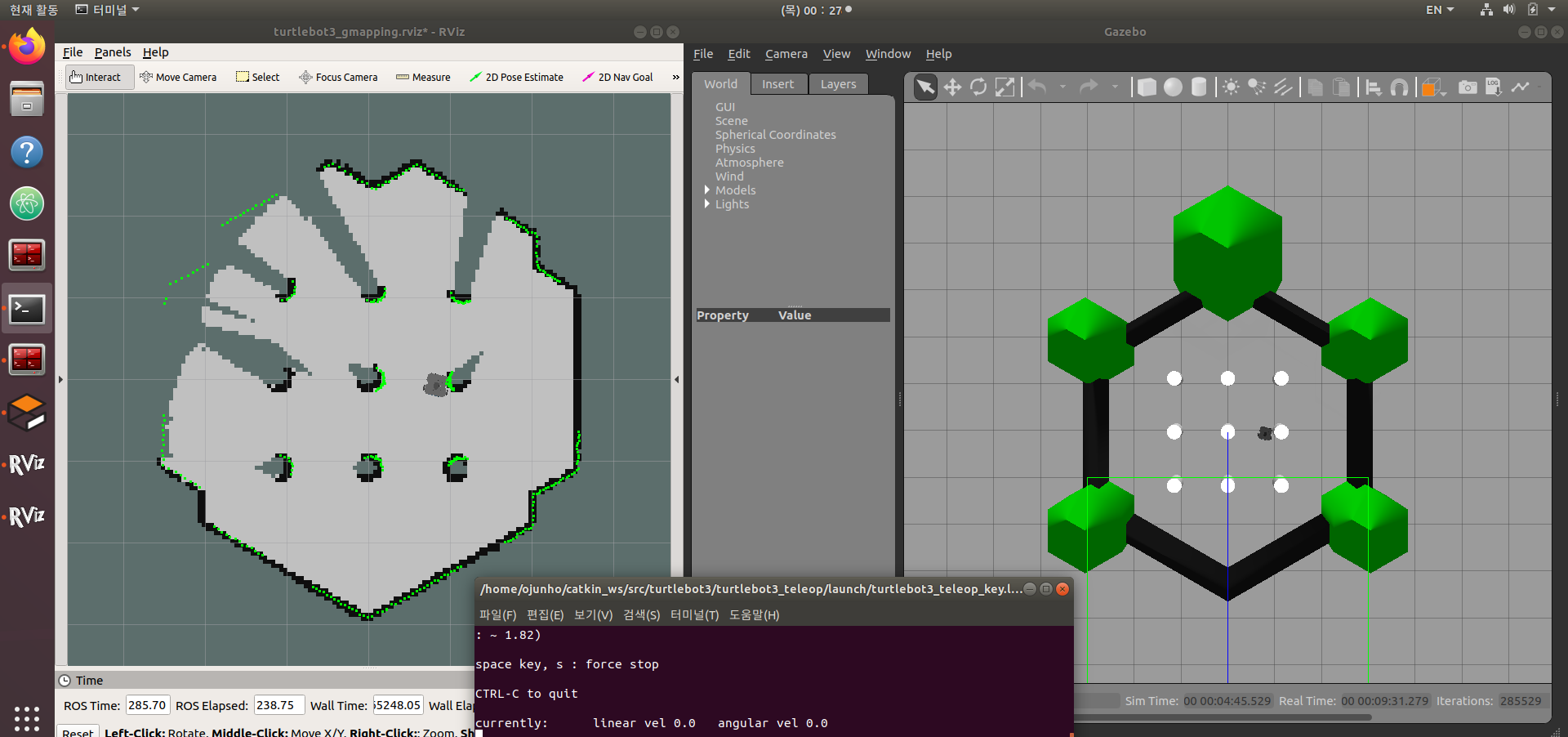

전부 구경시켜준뒤 map 파일로 저장할 수 있었다.
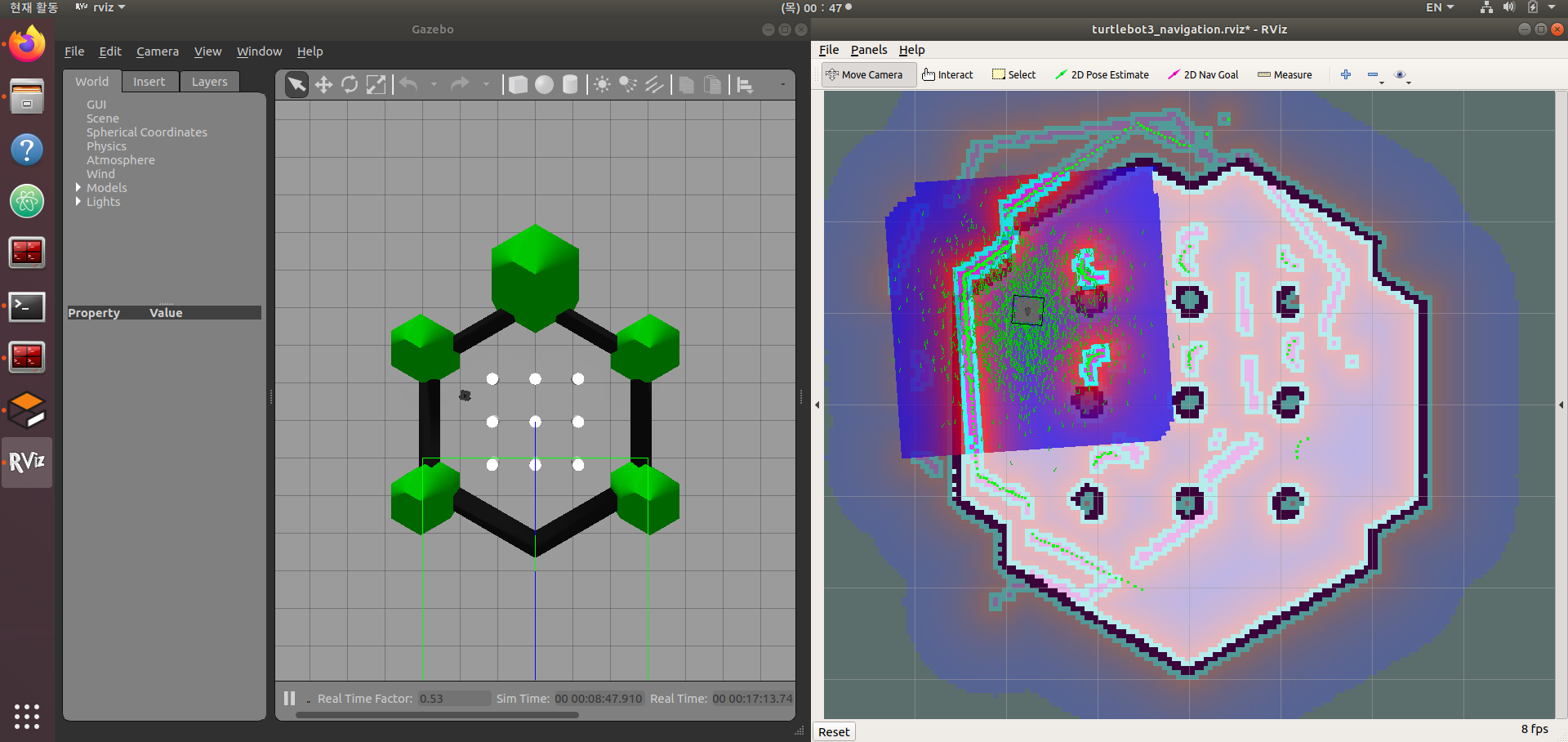
map 위에서 navigation도 실행할 수 있었다. 초기에는 초록색 화살표가 많은데, 로봇의 위치와 방향의 가능성(로봇이 이 위치에 이 방향을 가리키며 있을 확률) 을 나타낸 것이라고 한다.
teleop로 linear velocity 와 angular velocity를 살짝 조작해주면 거의 발산에 가깝고 많던, 초록색 화살표가 수렴하는 모습을 볼 수 있다.
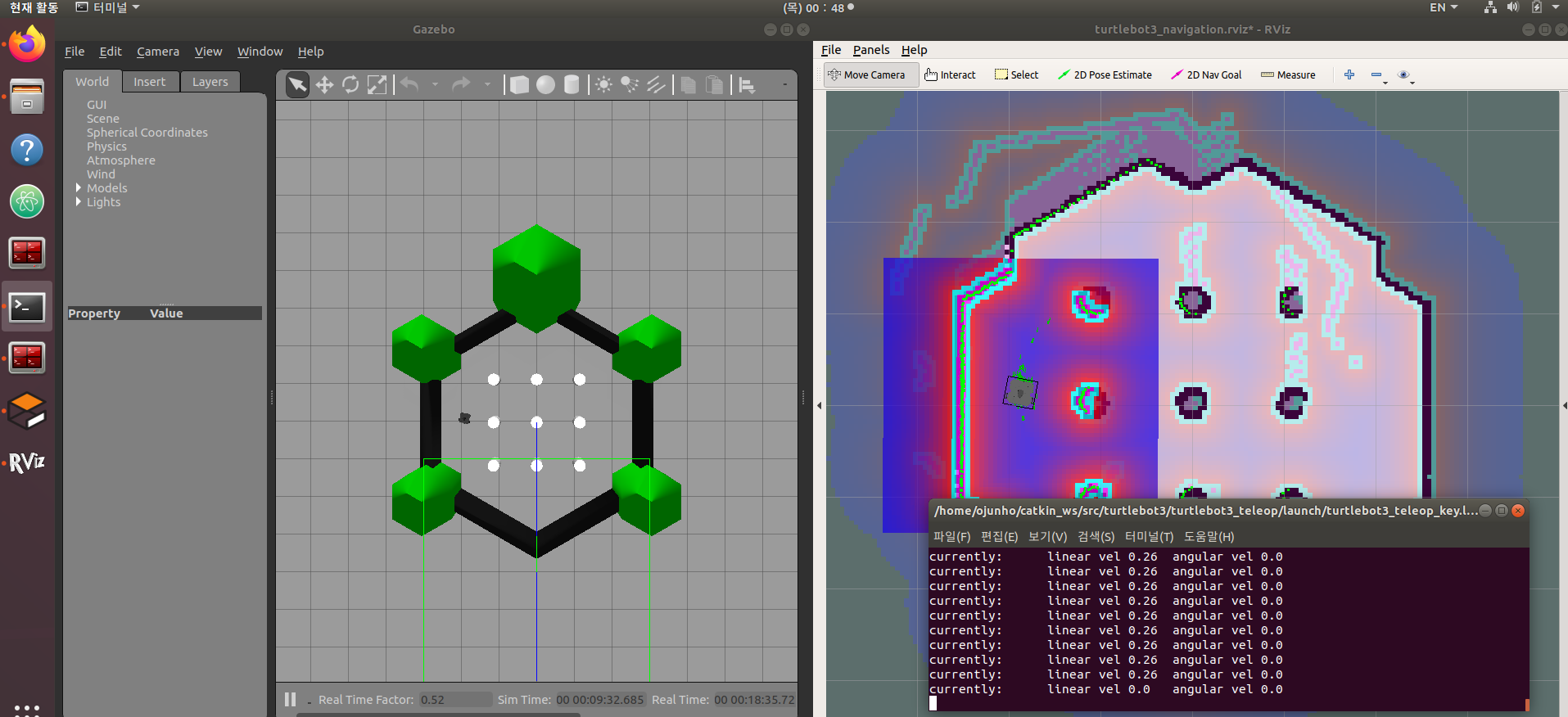
2D Nav Goal로 목적지를 설정해주면 이쁘게 따라가는 모습을 확인할 수 있었다.
실제 로봇이 없는데 실습 어떻게 진행할지 궁금했는데, 귀여운 터틀봇과 gazebo에서 놀 수 있다는 점이 신기하고 재미있었다.
반응형
'FOSCAR-(Autonomous Driving) > ROS 스터디' 카테고리의 다른 글
| [2023 ROS 스터디] 조성준 #4주차 - SLAM과 내비게이션 (1) | 2023.02.03 |
|---|---|
| [2023 ROS 스터디] 박주빈 #4주차 - ROS (0) | 2023.02.03 |
| [2023 ROS 스터디] 정혁제 #4주차 - SLAM / 네비게이션 (1) | 2023.02.01 |
| [2023 ROS 스터디] 최지웅 #4주차 - SLAM과 내비게이션 (0) | 2023.02.01 |
| [2023 ROS 스터디] 안수빈 #3주차 - ROS 기본 프로그래밍 (0) | 2023.01.30 |



