반응형
https://www.youtube.com/playlist?list=PLX-Ur4rl2-qwMK8H9FjTxjyKC-XeoP8Jg
2024 ROS 스터디 3주차
www.youtube.com
3주차 공부한 내용을 작성해보려고 한다.
Chapter7 에서는 퍼블리셔, 서비스, 클라이언트, 액션 등 다양한 노드 작성법에 대해 설명한다.
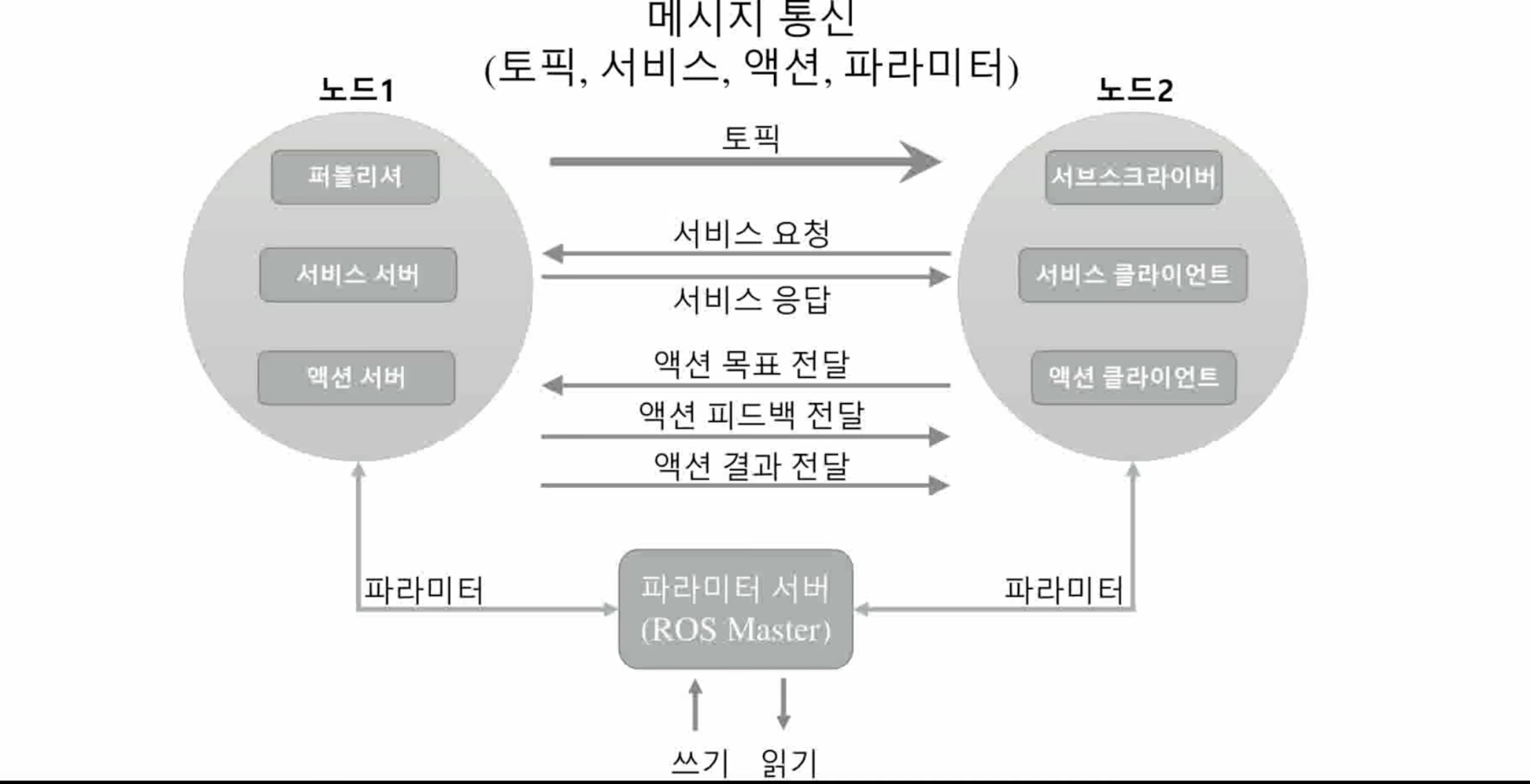
4가지 메시지 통신 방법이다.
ROS에서는 단방향 통신일 때, 'Topic' 이라는 메시지 통신을 사용한다.
이때, 송신 측을 'Publisher', 수신 측을 'Subscriber' 라고 부른다.
1) 패키지 생성
cd ~/catkin_ws/src
cakin_create_pkg ros_tutorials_topic message_generation std_msgs roscpp
2) 패키지 파일 설정
<? xml version="1.0"?>
<package format="2">
<name>ros_tutorials_topic</name>
<version>0.1.0</version>
<description>ROS turtorial package to learn the topic</description>
<license>Apache 2.0</license>
<author email="pyo@robotis.com">Yoonseok Pyo</author>
<maintainer email="pyo@robotis.com">Yoonseok Pyo</maintainer>
<url type="website">http://www.robotis.com
<url type="repository">https://github.com/ROBOTIS-GIT/ros_tutorials.git >
<url type="bugtracker">https://github.com/ROBOTIS-GIT/ros_tutorials/issues >
<buildtool_depend>catkin</buildtool_depend>
<depend>roscpp</depend>
<depend>std_msgs</depend>
<depend>message_generation</depend>
<export></export >
</package>
3) 빌드 설정 파일(CMakeLists.txt) 수정
cmake_minimum_required(VERSION 2.8.3)
project(ros_tutorials_topic)
## 캐빈 빌드를 할 때 요구되는 구성요소 패키지이다.
## 의존성 패키지로 message_generation, std_msgs, roscpp이며 이 패키지들이
## 존재하지 않으면 빌드 도중에 에러가 난다.
find_package(catkin REQUIRED COMPONENTS message_generation std_msgs roscpp)
## 메시지 선언: MsgTutorial.msg
add_message_files(FILES MsgTutorial.msg)
## 의존하는 메시지를 설정하는 옵션이다.
## std_msgs가 설치되어 있지 않다면 빌드 도중에 에러가 난다.
generate_messages(DEPENDENCIES std_msgs)
## 캐긴 패키지 옵션으로 라이브러리, 캐킨 빌드 의존성, 시스템 의존 패키지를 기술한다.
catkin_package(
LIBRARIES ros_tutorials_topic
CATKIN_DEPENDS std_msgs roscpp
)
## 인클루드 디렉터리를 설정한다.
include_directories(${catkin_INCLUDE_DIRS})
## topic_publisher 노드에 대한 빌드 옵션이다.
## 실행 파일, 타깃 링크 라이브러리, 추가 의존성 등을 설정한다.
add_executable(topic_publisher src/topic_publisher.cpp)
add_dependencies(topic_publisher ${${PROJECT_NAME}_EXPORTED_TARGETS}
${catkin_EXPORTED_TARGETS})
target_link_libraries(topic_publisher ${catkin_LIBRARIES})
## topic_subscriber 노드에 대한 빌드 옵션이다.
add_executable(topic_subscriber src/topic_subscriber.cpp)
add_dependencies(topic_subscriber ${${PROJECT_NAME}_EXPORTED_TARGETS}
${catkin_EXPORTED_TARGETS})
target_link_libraries(topic_subscriber ${catkin_LIBRARIES})
4) 메시지 파일 작성
time stamp
int32 data
5) Publisher node 작성
#include "ros/ros.h" // ROS 기본 헤더파일
#include "ros_tutorials_topic/MsgTutorial.h"// MsgTutorial 메시지 파일 헤더(빌드 후 자동 생성됨)
int main(int argc, char **argv) // 노드 메인 함수
{
ros::init(argc, argv, "topic_publisher"); // 노드명 초기화
ros::NodeHandle nh; // ROS 시스템과 통신을 위한 노드 핸들 선언
// 퍼블리셔 선언(이 노드는 퍼블리셔의 역할을 한다고 선언해 주는것),
// 퍼블리셔 ros_tutorial_pub 를 작성한다. 토픽명은 "ros_tutorial_msg" 이며,
// 퍼블리셔 큐(queue) 사이즈를 100개로 설정한다는 것이다
ros::Publisher ros_tutorial_pub = nh.advertise<ros_tutorials_topic::MsgTutorial>("ros_tutorial_msg", 100);
// 루프 주기를 설정한다. "10" 이라는 것은 10Hz를 말하는 것으로 0.1초 간격으로 반복된다
ros::Rate loop_rate(10);
// MsgTutorial 메시지 파일 형식으로 msg 라는 메시지를 선언
ros_tutorials_topic::MsgTutorial msg;
// 메시지에 사용될 변수 선언
int count = 0;
while (ros::ok())
{
msg.stamp = ros::Time::now(); // 현재 시간을 msg의 하위 stamp 메시지에 담는다
msg.data = count; // count라는 변수 값을 msg의 하위 data 메시지에 담는다
ROS_INFO("send msg = %d", msg.stamp.sec); // stamp.sec 메시지를 표시한다
ROS_INFO("send msg = %d", msg.stamp.nsec); // stamp.nsec 메시지를 표시한다
ROS_INFO("send msg = %d", msg.data); // data 메시지를 표시한다
ros_tutorial_pub.publish(msg); // 메시지를 발행한다
loop_rate.sleep(); // 위에서 정한 루프 주기에 따라 슬립에 들어간다
++count; // count 변수 1씩 증가
}
return 0;
}
6) Subsciber node 작성
#include "ros/ros.h" // ROS 기본 헤더파일
#include "ros_tutorials_topic/MsgTutorial.h" // MsgTutorial 메시지 파일 헤더 (빌드 후 자동 생성됨)
// 메시지 콜백 함수로써, 밑에서 설정한 ros_tutorial_msg라는 이름의 토픽
// 메시지를 수신하였을 때 동작하는 함수이다
// 입력 메시지로는 ros_tutorials_topic 패키지의 MsgTutorial 메시지를 받도록 되어있다
void msgCallback(const ros_tutorials_topic::MsgTutorial::ConstPtr& msg)
{
ROS_INFO("recieve msg = %d", msg->stamp.sec); // stamp.sec 메시지를 표시한다
ROS_INFO("recieve msg = %d", msg->stamp.nsec); // stamp.nsec 메시지를 표시한다
ROS_INFO("recieve msg = %d", msg->data); // data 메시지를 표시한다
}
int main(int argc, char **argv) // 노드 메인 함수
{
ros::init(argc, argv, "topic_subscriber"); // 노드명 초기화
ros::NodeHandle nh; // ROS 시스템과 통신을 위한 노드 핸들 선언
// 서브스크라이버 선언, ros_tutorials_topic 패키지의 MsgTutorial 메시지 파일을 이용한
// 서브스크라이버 ros_tutorial_sub 를 작성한다. 토픽명은 "ros_tutorial_msg" 이며,
// 서브스크라이버 큐(queue) 사이즈를 100개로 설정한다는 것이다
ros::Subscriber ros_tutorial_sub = nh.subscribe("ros_tutorial_msg", 100, msgCallback);
// 콜백함수 호출을 위한 함수로써, 메시지가 수신되기를 대기,
// 수신되었을 경우 콜백함수를 실행한다
ros::spin();
return 0;
}
7) ROS node build
catkin_make
8) Publisher, Subscriber 실행
rosrun ros_tutorials_topic topic_publisher
rosrun ros_tutorials_topic topic_subscriber
다음은 서비스 서버와 서비스 클라이언트 작성법이다.
1) service_client.cpp
#include "ros/ros.h" // ROS Default Header File
#include "ros_tutorials_service/SrvTutorial.h"// SrvTutorial Service File Header (Automatically created after build)
#include <cstdlib> // Library for using the "atoll" function
int main(int argc, char **argv) // Node Main Function
{
ros::init(argc, argv, "service_client"); // Initializes Node Name
if (argc != 3) // Input value error handling
{
ROS_INFO("cmd : rosrun ros_tutorials_service service_client arg0 arg1");
ROS_INFO("arg0: double number, arg1: double number");
return 1;
}
ros::NodeHandle nh; // Node handle declaration for communication with ROS system
// Declares service client 'ros_tutorials_service_client'
// using the 'SrvTutorial' service file in the 'ros_tutorials_service' package.
// The service name is 'ros_tutorial_srv'
ros::ServiceClient ros_tutorials_service_client = nh.serviceClient<ros_tutorials_service::SrvTutorial>("ros_tutorial_srv");
// Declares the 'srv' service that uses the 'SrvTutorial' service file
ros_tutorials_service::SrvTutorial srv;
// Parameters entered when the node is executed as a service request value are stored at 'a' and 'b'
srv.request.a = atoll(argv[1]);
srv.request.b = atoll(argv[2]);
// Request the service. If the request is accepted, display the response value
if (ros_tutorials_service_client.call(srv))
{
ROS_INFO("send srv, srv.Request.a and b: %ld, %ld", (long int)srv.request.a, (long int)srv.request.b);
ROS_INFO("receive srv, srv.Response.result: %ld", (long int)srv.response.result);
}
else
{
ROS_ERROR("Failed to call service ros_tutorial_srv");
return 1;
}
return 0;
}
2) service_server.cpp
#include "ros/ros.h" // ROS Default Header File
#include "ros_tutorials_service/SrvTutorial.h"// SrvTutorial Service File Header (Automatically created after build)
// The below process is performed when there is a service request
// The service request is declared as 'req', and the service response is declared as 'res'
bool calculation(ros_tutorials_service::SrvTutorial::Request &req,
ros_tutorials_service::SrvTutorial::Response &res)
{
// The service name is 'ros_tutorial_srv' and it will call 'calculation' function upon the service request.
res.result = req.a + req.b;
// Displays 'a' and 'b' values used in the service request and
// the 'result' value corresponding to the service response
ROS_INFO("request: x=%ld, y=%ld", (long int)req.a, (long int)req.b);
ROS_INFO("sending back response: %ld", (long int)res.result);
return true;
}
int main(int argc, char **argv) // Node Main Function
{
ros::init(argc, argv, "service_server"); // Initializes Node Name
ros::NodeHandle nh; // Node handle declaration
// Declare service server 'ros_tutorials_service_server'
// using the 'SrvTutorial' service file in the 'ros_tutorials_service' package.
// The service name is 'ros_tutorial_srv' and it will call 'calculation' function
// upon the service request.
ros::ServiceServer ros_tutorials_service_server = nh.advertiseService("ros_tutorial_srv", calculation);
ROS_INFO("ready srv server!");
ros::spin(); // Wait for the service request
return 0;
}
마지막으로, roslaunch 작성법에 대해 설명하려고 한다.
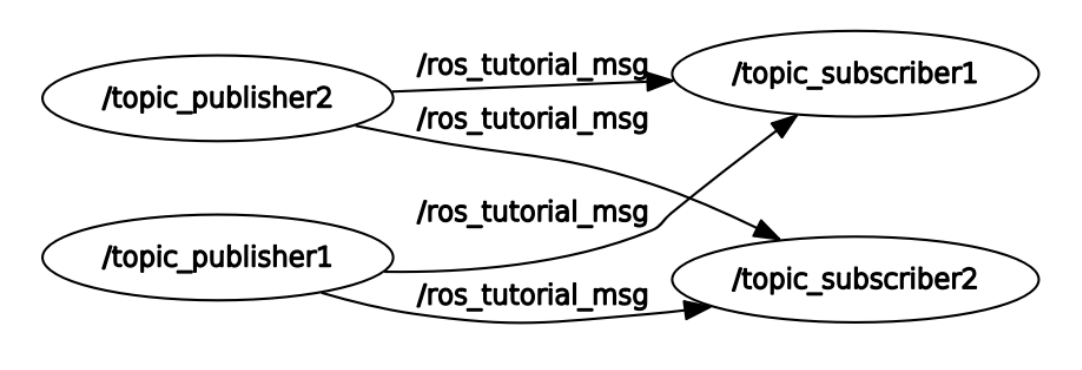
현재는 서로의 메시지를 모두 subscribe 하고 있다.
이 문제는 다른 roslaunch 네임스페이스 태그를 사용하여 해결할 수 있다.
<launch>
<group ns="ns1">
<node pkg="ros_tutorials_topic" type="topic_publisher" name="topic_publisher"/>
<node pkg="ros_tutorials_topic" type="topic_subscriber" name="topic_subscriber"/>
</group>
<group ns="ns2">
<node pkg="ros_tutorials_topic" type="topic_publisher" name="topic_publisher"/>
<node pkg="ros_tutorials_topic" type="topic_subscriber" name="topic_subscriber"/>
</group>
</launch>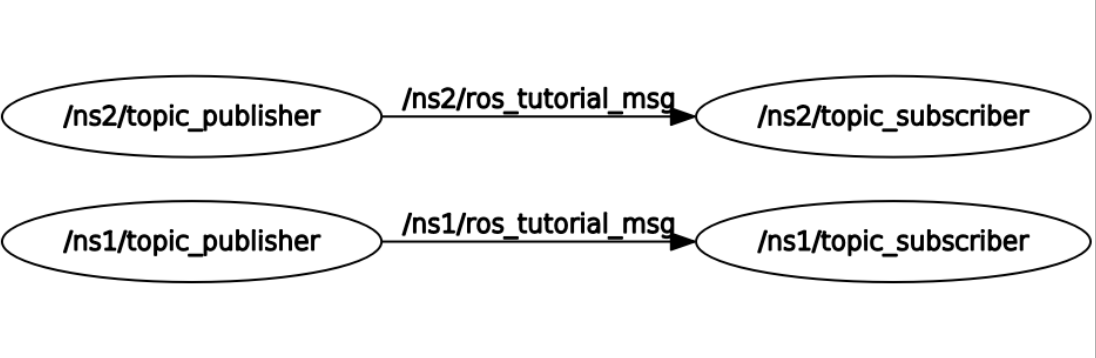
이렇게 예쁘게 다시 만들어졌다.
반응형
'FOSCAR-(Autonomous Driving) > ROS 스터디' 카테고리의 다른 글
| [2024 ROS 스터디] 이준호 #3주차 - ROS 기본 프로그래밍 (0) | 2024.02.13 |
|---|---|
| [2024 ROS 스터디] 안선영 #3주차 - ROS 기본 프로그래밍 (1) | 2024.02.13 |
| [2024 ROS 스터디] 정주광 #3주차 - ROS 기본 프로그래밍 (0) | 2024.02.13 |
| [2024 ROS 스터디] 이상혁 #2주차 - ROS 명령어 및 도구 (0) | 2024.02.13 |
| [2024 ROS 스터디] 변수양 #3주차 - ROS 기본 프로그래밍 (0) | 2024.02.13 |



