반응형
https://www.youtube.com/playlist?list=PLX-Ur4rl2-qwMK8H9FjTxjyKC-XeoP8Jg
2024 ROS 스터디 3주차
www.youtube.com
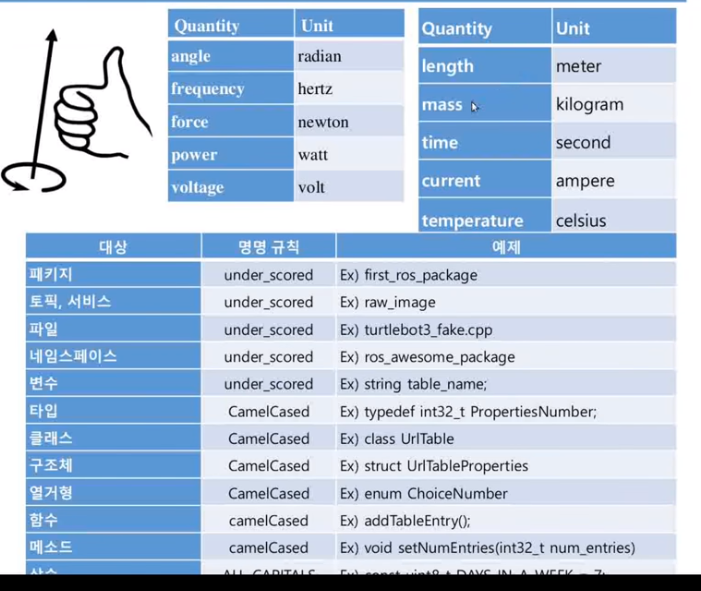
표준단위
SI단위 사용
좌표 표현 방식
x: forward, y: left, z: up
오른손 법칙
프로그래밍 규칙
서비스
서비스 서버 ↔ 서비스 클라이언트
클라이언트 → 서버 (서비스 요청)
서버 → 클라이언트 (서비스 응답)
액션
노드1 액션서버 ↔ 노드2 액션 클라이언트
노드2 → 노드1 (액션 목표 전달)
노드1 → 노드2(액션 피드백 전달, 액션 결과 전달)
매개변수

토픽 : 퍼블리셔, 서브스크라이버
서비스 : 서비스 서버, 서비스 클라이언트
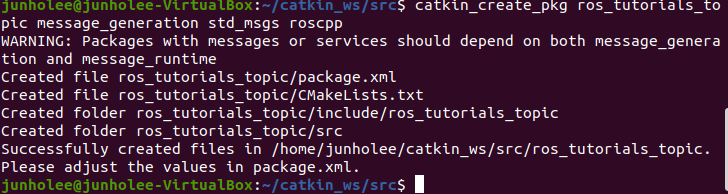
패키지생성
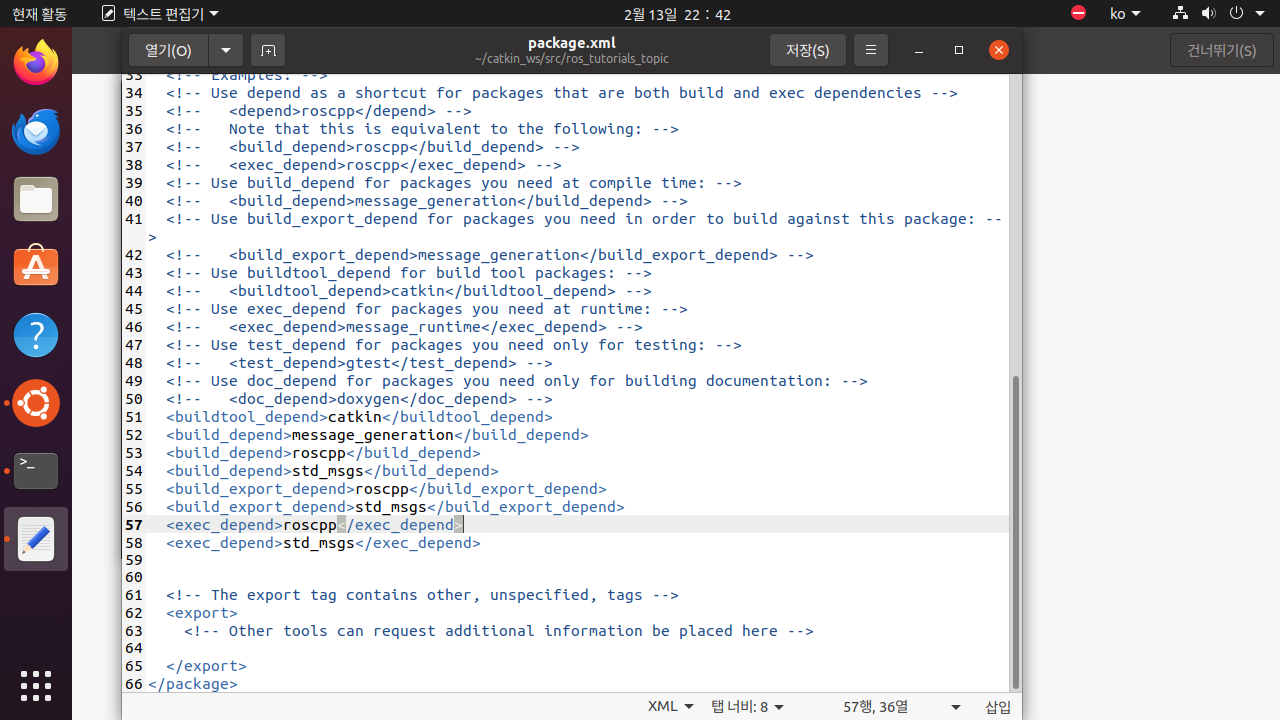
패키지 설정 파일 수정

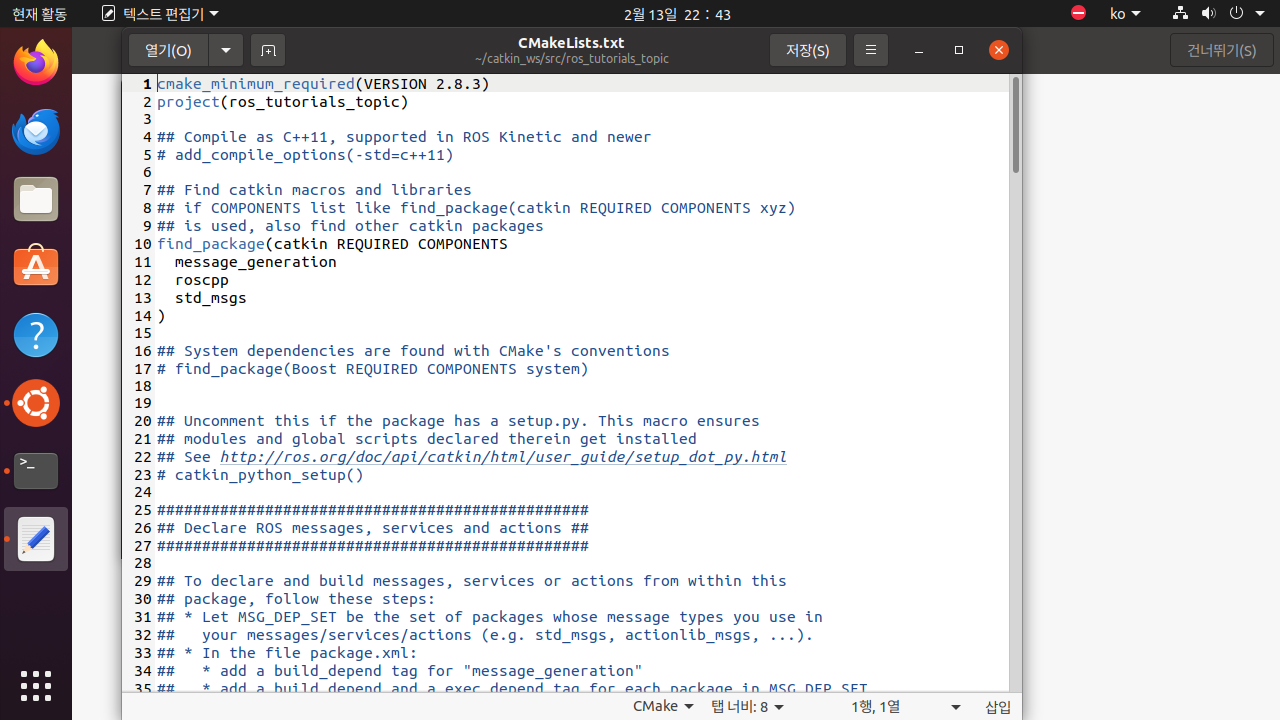
빌드 설정 파일 수정
메세지 파일 수정

퍼블리셔 노드 작성, 서브스크라이버 노드 작성
- ROS 노드 빌드$ cd ~/catkin_ws ; catkin 폴더로 이동 $ catkin_make ; catkin 빌드 실행
- 퍼블리셔 실행$ rosrun ros_tutorials_topic topic_publisher
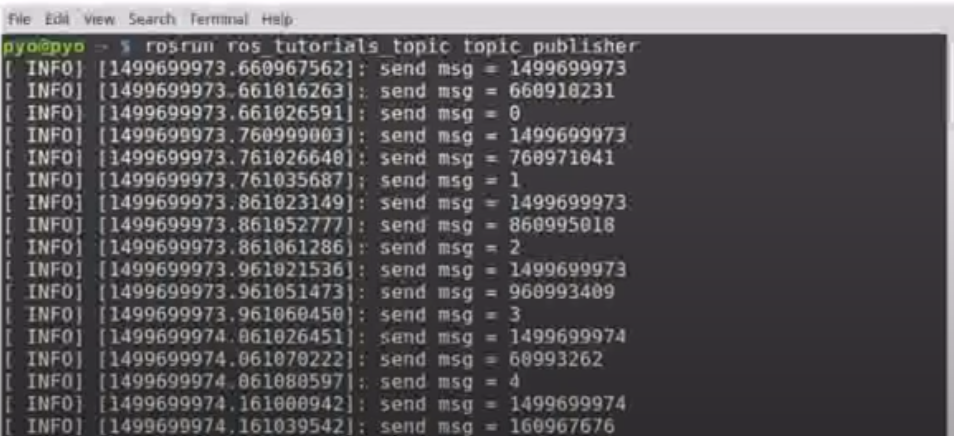
publisher가 잘 받지 못해 영상 이미지 대체 - 다시 해보겠습니다... ㅜㅜ
실행 이미지
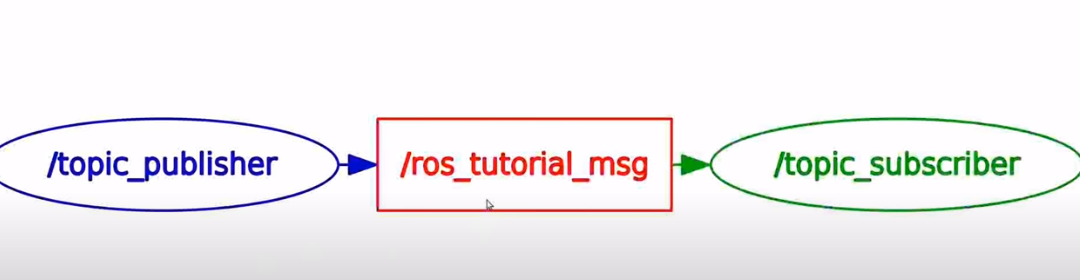
$rqt_graph 명령어를 통해 publisher와 subscriber 빌드 잘 된것을 확인하고, 토픽 잘 받는지 확인하기~
반응형
'FOSCAR-(Autonomous Driving) > ROS 스터디' 카테고리의 다른 글
| [2024 ROS 스터디] 이강욱 #4주차 - SLAM & Navigation (1) | 2024.02.16 |
|---|---|
| [2024 ROS 스터디] 이상혁 #3주차 - ROS 기본 프로그래밍 (0) | 2024.02.13 |
| [2024 ROS 스터디] 안선영 #3주차 - ROS 기본 프로그래밍 (1) | 2024.02.13 |
| [2024 ROS 스터디] 민경서 #3주차 - ROS 기본 프로그래밍 (0) | 2024.02.13 |
| [2024 ROS 스터디] 정주광 #3주차 - ROS 기본 프로그래밍 (0) | 2024.02.13 |



