먼저 sudo 권한을 얻기 위해
https://lieadaon.tistory.com/178 이 블로그에서 나온대로 했습니다.
vi 편집기를 아마 사용하실텐데 vi 편집기 사용법 참고하시면 되겠습니다.
그리고 보통 우분투 사용자들은 터미널을 사용하기보다는 주로
터미네이터(terminator) 를 쓰는 것 같습니다.
영상에서 roscore를 켜놓고 터미널을 다시 켜서 명령어를 입력하는데 한 눈에 보이지 않으니까 좀 불편합니다.
터미네이터는 터미널을 분할할 수 있습니다.

이런식으로 한 화면에 모든 터미널이 들어오게 됩니다.
설치하시려면 터미널에 sudo apt-get install terminator 입력하시면 됩니다.
관련 단축키
* 수평 분할 : Ctrl + Shift + O
* 수직 분할 : : Ctrl + Shift + E
* 다음 창 활성화 : Ctrl + Tab or Ctrl + Shift + N
* 이전 창 활성화 : Ctrl + Shift + Tab or Ctrl + Shift + P
* 현재 활성화 된 창 닫기 : Ctrl + Shift + W
* 터미네이터 실행 : Ctrl + Alt + T
* 터미네이터 종료 : Ctrl + Shift + Q
* 전체화면 : F11
//출처 https://harryp.tistory.com/630
ros 사이트에서 수동설치 하여 turtlesim을 돌렸는데 패키지가 없다고 나와서
sudo apt-get install ros-melodic-turtlesim직접 추가했습니다.
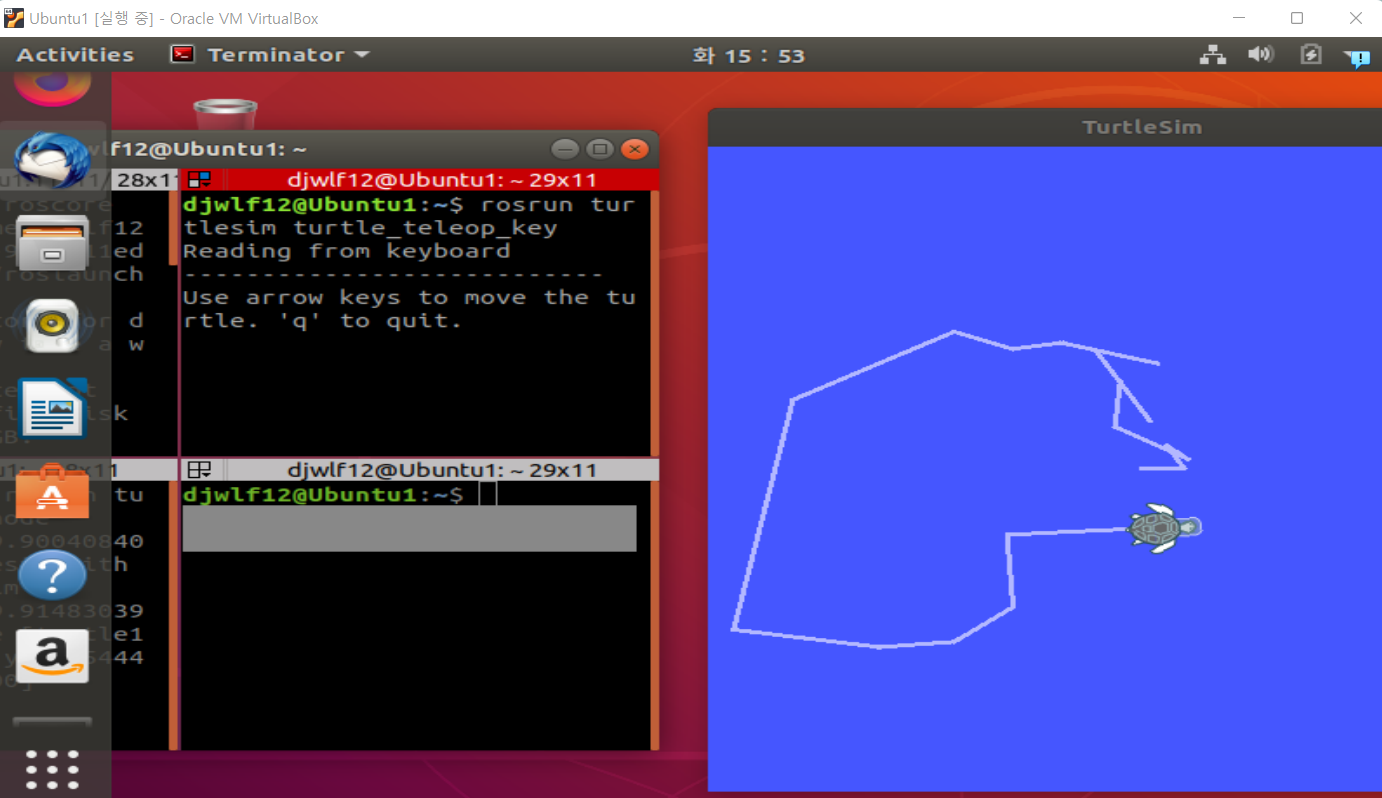
영상에 나온대로 roscore 입력하고 rosrun 해서 터틀심 틀어보겠습니다.

감격스럽네요 거북이가 안 나와서 애 먹었었는데
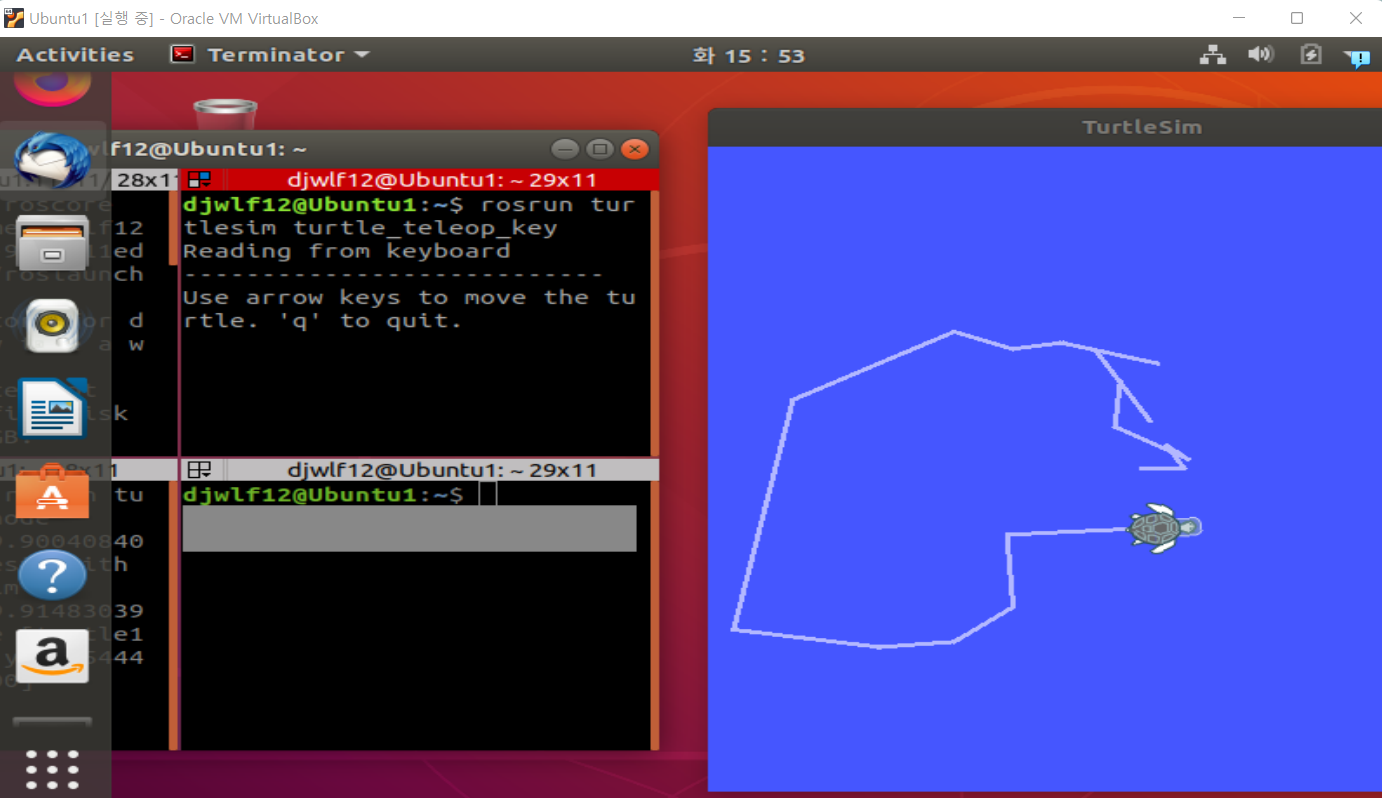
움직입니다.
앞으로 이것을 어떤식으로 활용할지 기대가 됩니다.
'FOSCAR-(Autonomous Driving) > ROS 스터디' 카테고리의 다른 글
| [2023 ROS 스터디] 임현진 #1주차 - ROS설치 (2) | 2023.01.15 |
|---|---|
| [2023 ROS 스터디] 신의석 #1주차 - ROS설치 (1) | 2023.01.15 |
| [2023 ROS 스터디] 조한준 #1주차 - ROS설치 (1) | 2023.01.14 |
| [2023 ROS 스터디] 홍선재 #1주차 - ROS설치 (1) | 2023.01.14 |
| [2023 ROS 스터디] 김동훈 #1주차 - ROS 설치(에러 감옥에서 탈출하기) (4) | 2023.01.14 |




{kind=link}