처음 ROS를 설치할 때는 한 줄 설치가 편법인 것 같다는 생각이 들어 공식 홈페이지를 통해 설치하려고 했다.
http://wiki.ros.org/kinetic/Installation/Ubuntu
kinetic/Installation/Ubuntu - ROS Wiki
We are building Debian packages for several Ubuntu platforms, listed below. These packages are more efficient than source-based builds and are our preferred installation method for Ubuntu. Note that there are also packages available from Ubuntu upstream. P
wiki.ros.org
공식사이트 기준 1.4 Installation 과정에서 에러가 발생하여 그것에 대해 구글링을 했다. 그 에러를 해결하려면 어떠한 명령을 지시해야 했는데 그 명령을 지시했더니 또 다른 에러가 발생했다. 그리고 이 또 다른 에러를 해결하기 위해 그에 해당하는 명령을 지시했더니 제 3의 에러가 발생하는 대참사가 일어났다..
이러한 에러 감옥에 빠진 상태로 어떻게든 한 줄 설치는 쓰지 않고 해결하려 노력했지만 결국 감옥에서 빠져나오지 못했고
한 줄 설치에 손을 대보기로 했다. 정말 수십번의 도전에도 설치되지 않던 ROS가 수많은 알 수 없는 언어들과 함께 설치가 되는 모습을 보고는 과거의 내가 원망스러웠다.😭
그 다음 roscore 명령을 실행할 때 새로운 terminal이 아닌 ROS를 설치한 terminal에서 실행을 했더니 오류가 발생했다.
처음에는 도대체 이게 왜 오류가 발생하는지 몰랐지만 강의를 자세히 보니 새로운 terminal을 만들어 실행하는 것을 보고 나도 새로운 terminal을 만들어 실행해봤더니 실행이 바로 잘 되었다.
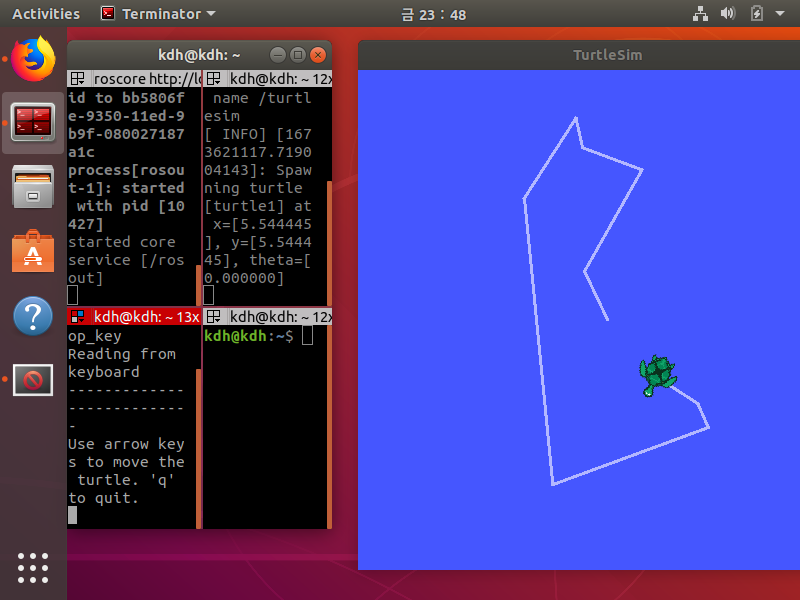
강의 중에 언급된 terminator를 설치하여 여러 가지의 terminal들을 동시에 띄운 후 turtlesim을 실행했더니 너무나도 잘 되는 모습이었다. 하지만 화면의 크기가 너무 작아서(화면을 늘려도 정해진 크기 이상으로는 늘려지지가 않아 여백만 늘어나는 모습이었다.) 각각의 terminal들과 turtlesim 실행화면을 동시에 쾌적하게 보는 것이 힘들다고 생각했다.
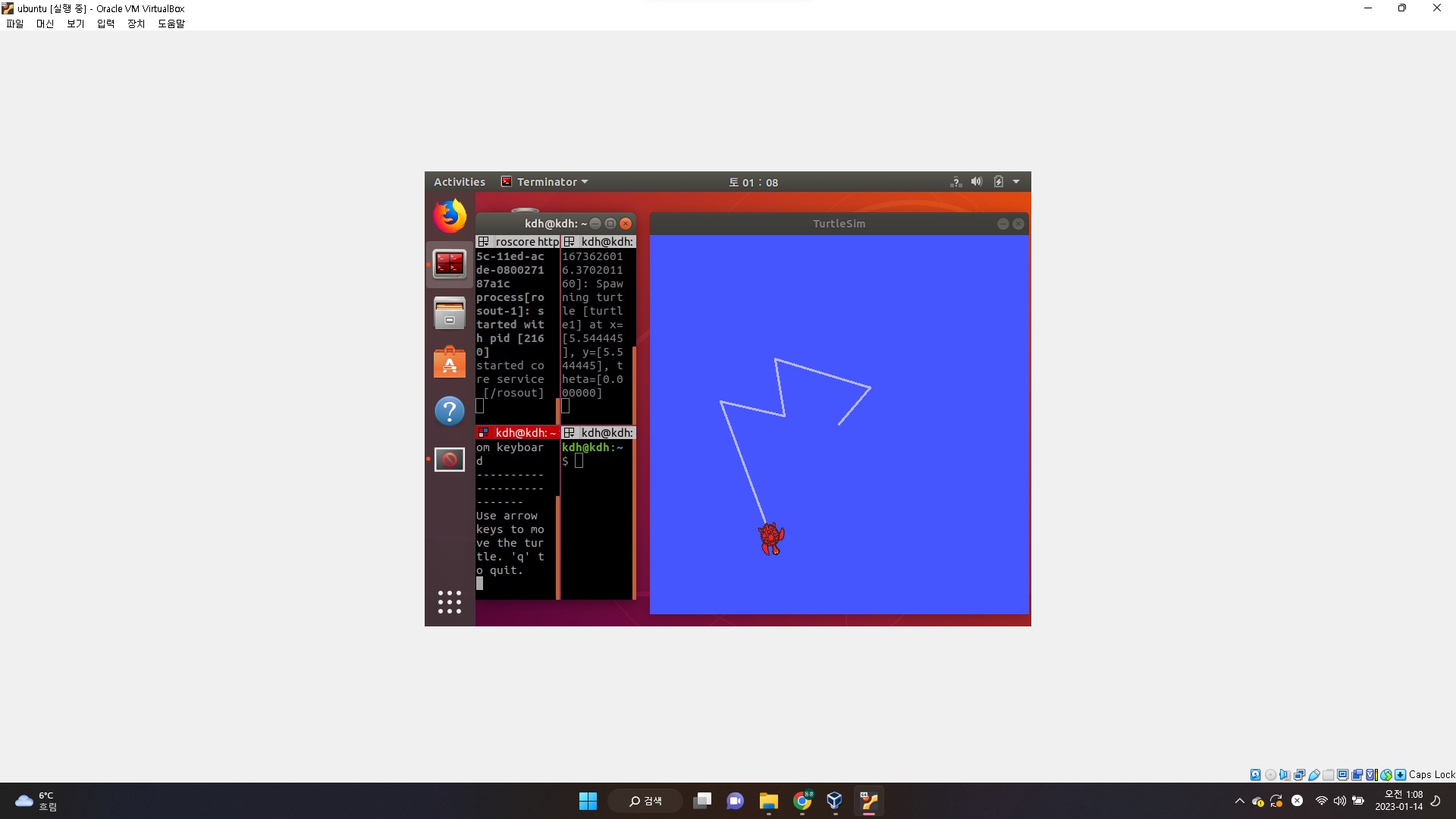
이런 식으로 전체 화면으로 늘려도 늘어나지 않고 여백만 잔뜩 생겨서 보기에 상당히 불편했다.

설정-디스플레이 창에서 그래픽 컨트롤러를 VBoxVGA로 바꾼 후 다시 실행해보았다.

그러면 이렇게 Ubuntu 화면을 늘리면 여백 없이 쾌적하게 볼 수 있다.
아직은 구글링으로도 해결이 안 되는 에러가 너무 많이 발생하여 결국에는 한 줄 설치를 이용하여 ROS를 설치했지만 스터디를 진행하면서 Ubuntu와 ROS에 익숙해지면 새로운 Ubuntu 환경을 만들어 공식 홈페이지의 절차에 따라 설치하는 것도 다시 한 번 도전할 예정이다.
'FOSCAR-(Autonomous Driving) > ROS 스터디' 카테고리의 다른 글
| [2023 ROS 스터디] 임현진 #1주차 - ROS설치 (2) | 2023.01.15 |
|---|---|
| [2023 ROS 스터디] 신의석 #1주차 - ROS설치 (1) | 2023.01.15 |
| [2023 ROS 스터디] 조한준 #1주차 - ROS설치 (1) | 2023.01.14 |
| [2023 ROS 스터디] 홍선재 #1주차 - ROS설치 (1) | 2023.01.14 |
| [2023 ROS 스터디] 오현민 #1주차 - ROS설치 (4) | 2023.01.12 |



