약 4주간 아래의 ROS 강의를 보고 중요한 내용을 정리하려고 한다.
ROS Courses (한국어)
https://github.com/robotpilot/ros-seminar
www.youtube.com
1주차 : Chapter1 ~ Chapter3
2주차 : Chapter4 ~ Chapter6
3주차 : Chapter7
4주차 : Chapter11
다음과 같은 계획으로 진행할 예정이다.
바로 1주차 공부한 내용을 작성해보려고 한다.
Chapter1 에서는 로봇 소프트웨어 플랫폼이라는 주제로 플랫폼의 구성 요소, 로봇 소프트웨어 플랫폼, 필요성, 필요성이 가져올 미래에 대해 설명한다.
로봇 소프트웨어 플랫폼에 대해 자세히 알고 싶다면 보는 것을 추천한다. 하지만, 시간이 없다면 굳이 안 봐도 될 것 같다.
Chapter2 에서는 본격적으로 ROS에 대해 설명한다.
ROS 란 Robot Operating System 의 약자로, 로봇을 위한 운영체제이다.
참고로 윈도우, 리눅스, 안드로이드와 같은 전통적인 운영체제는 아니고 전통적인 운영체제를 이용하고 있는 메타운영체제이다.
ROS에 대한 개념뿐만 아니라 ROS 생태계, 특징에 대해 자세히 설명해준다.
Chapter3 에서는 개발환경구축에 대해 설명해준다.
나는 Ubuntu 20.04 환경이고 ROS Noetic 을 설치할 예정이다.
1. ROS 설치 방법
https://wiki.ros.org/noetic/Installation/Ubuntu
noetic/Installation/Ubuntu - ROS Wiki
If you rely on these packages, please support OSRF. These packages are built and hosted on infrastructure maintained and paid for by the Open Source Robotics Foundation, a 501(c)(3) non-profit organization. If OSRF were to receive one penny for each downlo
wiki.ros.org
ros 설치는 위에 링크를 그대로 하면 쉽게 설치할 수 있다.
2. ROS 설치 후, 동작 테스트
터미널을 4개 키고 아래 명령어를 순서대로 입력한다.
rosversion -d
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key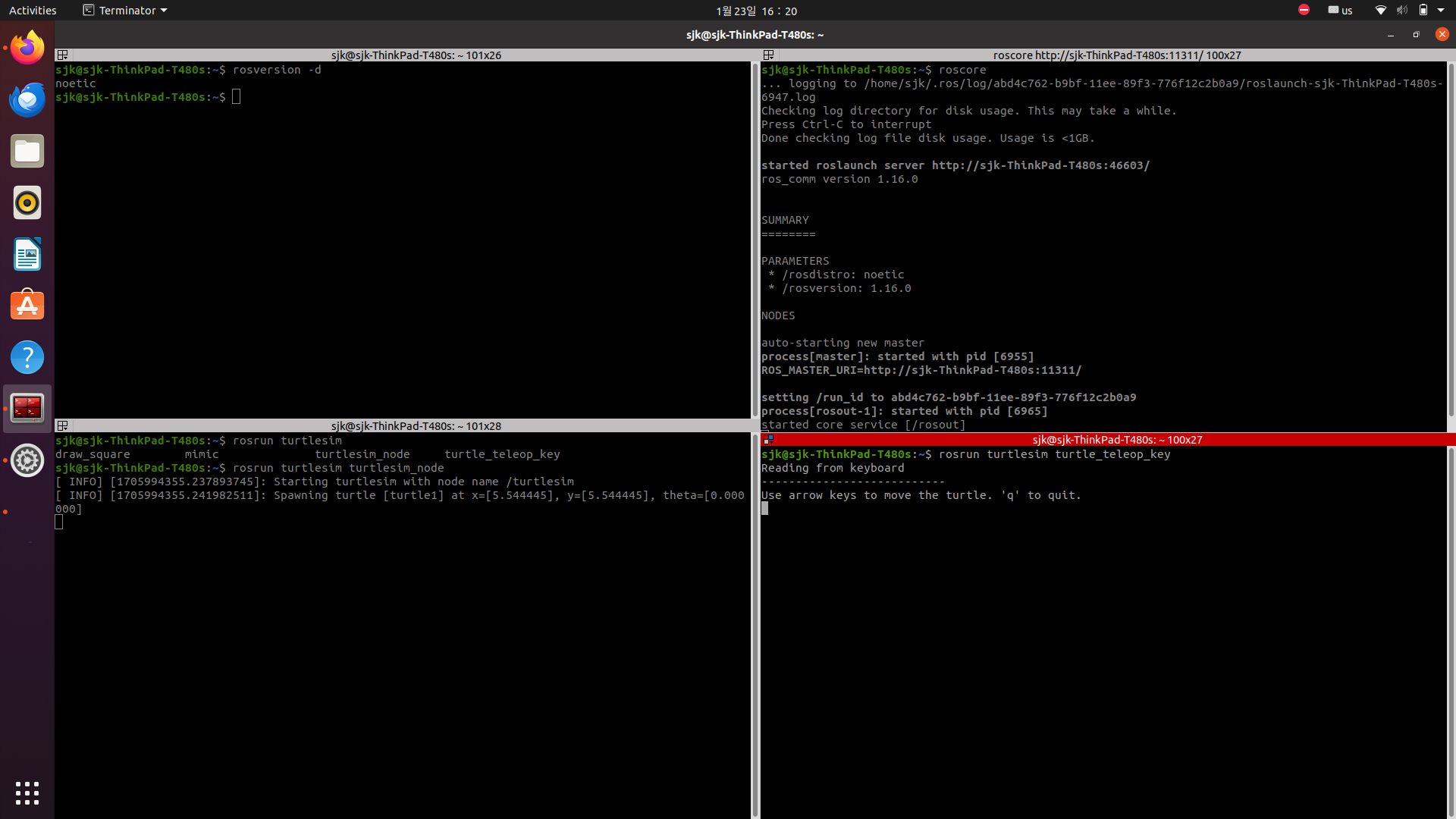
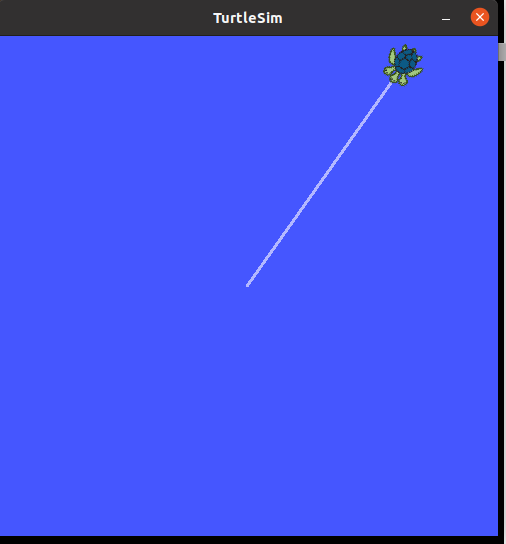
거북이가 잘 나오고, 움직인다면, 성공!
마지막으로, rqt_graph 가 잘 나오는지 확인해보자.
rosrun rqt_graph rqp_graph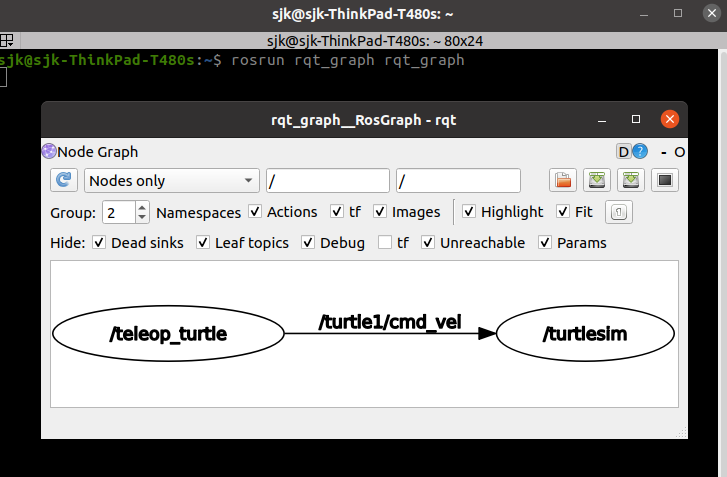
* 참고로 ubuntu 기본 터미널 말고 terminator를 사용하자!
sudo apt install terminator(단축키는 구글링하면 많이 나옴.)
'FOSCAR-(Autonomous Driving) > ROS 스터디' 카테고리의 다른 글
| [2024 ROS 스터디] 정주광 #1주차 - ROS 소개 및 설치하기 (1) | 2024.01.26 |
|---|---|
| [2024 ROS 스터디] 박재훈 #1주차 - ROS 소개 및 설치하기 (0) | 2024.01.24 |
| [2024 ROS 스터디] 성창엽 #1주차 - ROS 소개 및 설치하기 (0) | 2024.01.22 |
| [2023 ROS 스터디] 주승근 #4주차 - SLAM & 네비게이션 (1) | 2023.02.06 |
| [2023 ROS 스터디] 이은선 #4주차 - SLAM과 내비게이션 (0) | 2023.02.05 |



