https://www.youtube.com/playlist?list=PLRG6WP3c31_VIFtFAxSke2NG_DumVZPgw
ROS Courses (한국어)
https://github.com/robotpilot/ros-seminar
www.youtube.com
다음 강의의 챕터 1, 2, 3 강의 내용을 요약한 글입니다.
기존 로봇 개발은 하드웨어 설계부터 비전, 네비게이션 등을 모두 다 개발해야 하고 하드웨어가 달라지면 소프트웨어 수정도 필요합니다. 이러한 단점을 해결하기 위해 로봇 소프트웨어 플랫폼 사용합니다.
로봇 소프트웨어 플랫폼의 장점
- 프로그램의 재사용
- 통신 기반 프로그
- 개발도구 지원
- 활성화된 커뮤니티
많은 로봇 소프트웨어 플랫폼 중 ROS의 장점은 무료이며 사용자가 가장 많고 이미 만들어진 오픈소스가 많습니다.
다음을 참고하여 Ubuntu 20.04 기준 ROS noetic 버전을 설치해줍니다.
https://wiki.ros.org/noetic/Installation/Ubuntu
noetic/Installation/Ubuntu - ROS Wiki
If you rely on these packages, please support OSRF. These packages are built and hosted on infrastructure maintained and paid for by the Open Source Robotics Foundation, a 501(c)(3) non-profit organization. If OSRF were to receive one penny for each downlo
wiki.ros.org

터미널 3개를 실행하고 다음과 같이 입력해줍니다.
$ roscore
$ rosrun turtlesim turtlesim_node
$ rosrun turtlesim turtle_teleop_key

귀여운 거북이가 나왔다면 성공입니다.
rosrun turtlesim turtle_teleop_key를 실행한 터미널에서 방향키를 입력해주면 거북이가 움직입니다.
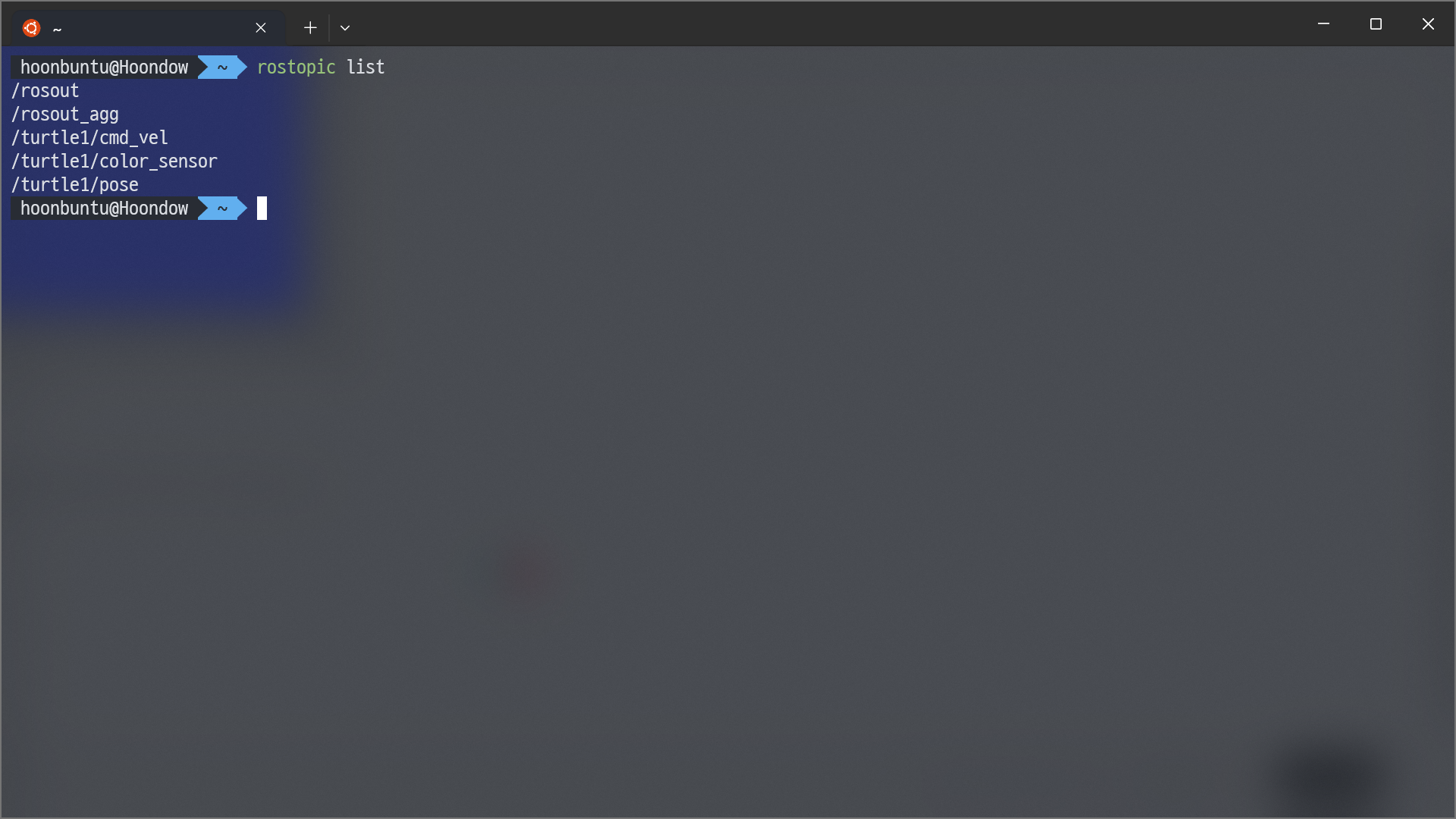
토픽도 한 번 확인해줍니다.
다음 시간에 뵙겠습니다.
'FOSCAR-(Autonomous Driving) > ROS 스터디' 카테고리의 다른 글
| [2024 ROS 스터디] <정성진> #1주차 - ROS 소개 및 설치하기 (0) | 2024.01.27 |
|---|---|
| [2024 ROS 스터디] 정주광 #1주차 - ROS 소개 및 설치하기 (1) | 2024.01.26 |
| [2024 ROS 스터디] 민경서 #1주차 - ROS 소개 및 설치하기 (1) | 2024.01.23 |
| [2024 ROS 스터디] 성창엽 #1주차 - ROS 소개 및 설치하기 (0) | 2024.01.22 |
| [2023 ROS 스터디] 주승근 #4주차 - SLAM & 네비게이션 (1) | 2023.02.06 |



