1주차 과제로 3개의 강의를 통해 ROS가 무엇인지에 대해서 찍먹해 보았다.
Chapter1)
Personal computer와 Personal phone는 다양한 하드웨어의 결합이 가능한 하드웨어 모듈로 이루어져 있으며 운영 체제 및 애플리케이션을 기반으로 이루어져 있다.
생태계 = 하드웨어 모듈 + 운영체제 + 앱 +유저
서비스 제공을 통한 유저가 생겨나며 유저의 피드백을 수용하고 하드웨어, 운영체제 그리고 앱(서비스)의 발전이 이루어짐을 알 수 있었다.
마찬가지로, 로봇 분야에서도 동일하게 적용 가능하다. 역사는 반복되며 로봇분야에서도 Personal computer, Personal phone와 같은 역사로 발전할 수 있다. (아직까 로봇분야의 운영체제는 춘추전국시대로 대중화 x)

로봇 소프트웨어의 플랫폼이 왜 필요한지와 다양한 로봇 운영체제를 알 수 있었으며 전에는 하드웨어에 대한 지식이 필수적으로 필요했다면 이제는 로봇 소프트웨어의 발전으로 하드웨어에 대한 지식없이 로봇 소프트웨어에 대한 진로가 무궁무진 한 것을 알 수 있었다.
Chapter 2)
ROS(Robot Operating System) : 오픈소스를 기반으로 퍼스널 로봇을 위한 프로그램. 로봇 소프트웨어를 개발하기 위한 소프트웨어 프레임워크
ROS는 운영체제가 아닌 메타운영체제
메타운영체제란? : 리눅스, 윈도우와 같은 전통적인 운영체제가 아닌 이런 전통적인 운영체제들을 이용하며 로봇 응용 소프트웨어 개발을 위한 프레임워크(툴박스)를 제공하며 생태계를 갖춘다.
ROS 특징
1) 통신인프라
- 노드 간 데이터 통신을 제공
- 통상적 미들웨어로 지칭되는 메시지 전달 인터페이스 지원
Ex) 메시지 파싱 기능, 메시지의 기록 및 재생, 메시지 사용으로 다양한 프로그래밍 언어 사용가능, 분산매개 변수 시스템
2) 로봇 관련 다양한 기능
Ex) 로봇에 대한 표준 메시지 정의, 로봇 기하학 라이브러리, 로봇 기술 언어, 진단 시스템, 센싱/인식, 내비게이션, 매니플레이션
3) 다양한 개발 도구
- 로봇 개발에 필요한 다양한 개발도구 제공
- 로봇 개발의 효율성 향상
이번 강의에 대해서는 ROS의 정의와 특징, 메타운영체가 무엇인지에 대해서 배울 수 있었다.
Chapter 3)
본격적으로 ROS 설치하기...
https://wiki.ros.org/noetic/Installation/Ubuntu
noetic/Installation/Ubuntu - ROS Wiki
If you rely on these packages, please support OSRF. These packages are built and hosted on infrastructure maintained and paid for by the Open Source Robotics Foundation, a 501(c)(3) non-profit organization. If OSRF were to receive one penny for each downlo
wiki.ros.org
ROS 다운로드 순서대로 진행하며 순조롭게 잘 설치되나 싶었지만,,,
밥 먹고 온 후 노트북 켜보니 생겨버린 암호
저번 주에 설치하고 설정한 비번을 까먹은 나 구글링해도 모르겟고 다시 우분투 설치해줍니다 ^ㅡ^..
설치 후 터미널 창 4개를 열고 아래 명령어 입력
rosversion -d
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
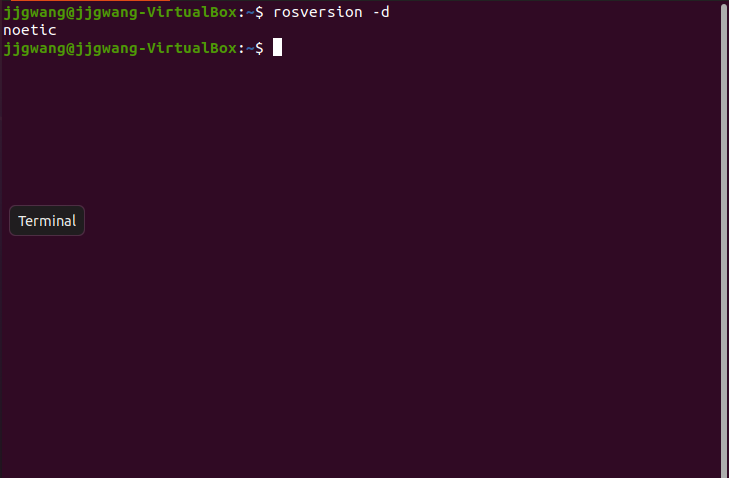

3번째 문구를 입력하면 거북이 등장
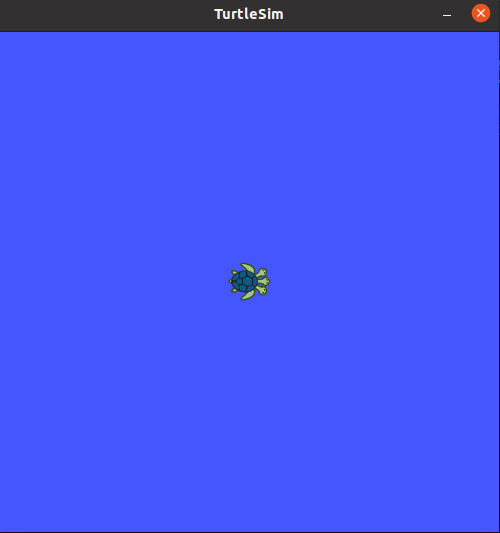
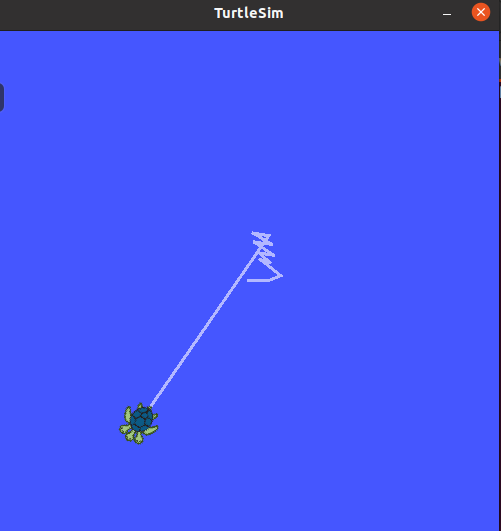
근데 왜 내 거북이는 머리가 3개지? 암튼 잘 움직이는 것 같다 끝~
'FOSCAR-(Autonomous Driving) > ROS 스터디' 카테고리의 다른 글
| [2024 ROS 스터디] <유민아> #1주차 - ROS 소개 및 설치하기 (2) | 2024.01.27 |
|---|---|
| [2024 ROS 스터디] <정성진> #1주차 - ROS 소개 및 설치하기 (0) | 2024.01.27 |
| [2024 ROS 스터디] 박재훈 #1주차 - ROS 소개 및 설치하기 (0) | 2024.01.24 |
| [2024 ROS 스터디] 민경서 #1주차 - ROS 소개 및 설치하기 (1) | 2024.01.23 |
| [2024 ROS 스터디] 성창엽 #1주차 - ROS 소개 및 설치하기 (0) | 2024.01.22 |



