[2025 ROS 스터디] 전예림 #3주차 - ROS 기본 프로그래밍
1. 프로그래밍 전에 알아둬야 할 사항1) 표준단위: SI 단위 사용(angle: radian, frequency: hertz, force: newton, power: watt, voltage: volt, length: meter, mass: kilogram, time: second, current: ampere, temprature: celsius)2) 좌표 표현 방식(x: forward, y: left, z: up), 오른손의 법칙3) 프로그래밍 규칙2. 토픽, 퍼블리셔, 서브스크라이버1) 패키지 생성cd ~/catkin_ws/srccatkin_create_pkg ros_tutorials_topic message_generation std_msgs roscpp(topic_publisher이 messa..
 [2025 ROS 스터디] 한상민 #2주차-ROS의 중요 컨셉, 명령어, 도구
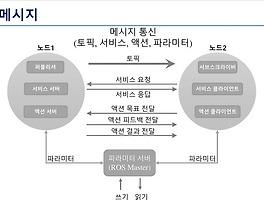
1. ROS의 핵심 구성 요소노드(Node)ROS에서 노드는 실행 가능한 독립적인 프로그램 단위로, 각 노드는 로봇의 특정 기능(예: 센서 입력, 모터 제어 등)을 담당한다.일반적으로 하나의 로봇은 수십 개 이상의 노드로 구성되며, 각 노드는 서로 통신하여 협력한다.패키지(Package)패키지는 ROS에서 가장 기본적인 소스코드 단위로, 노드, 메시지, 서비스 정의, 실행 스크립트 등이 포함된다.재사용성과 유지보수를 위해 관련 기능들을 하나의 패키지로 묶어 관리한다. 2. 노드 간 통신 구조메시지(Message)와 토픽(Topic)메시지는 노드 간에 주고받는 데이터 형식을 의미하며, 예를 들어 std msgs/String, sensor msgs/Image 등이 있다.토픽은 메시지를 주고받는 채널로, 하나..
[2025 ROS 스터디] 한상민 #2주차-ROS의 중요 컨셉, 명령어, 도구
1. ROS의 핵심 구성 요소노드(Node)ROS에서 노드는 실행 가능한 독립적인 프로그램 단위로, 각 노드는 로봇의 특정 기능(예: 센서 입력, 모터 제어 등)을 담당한다.일반적으로 하나의 로봇은 수십 개 이상의 노드로 구성되며, 각 노드는 서로 통신하여 협력한다.패키지(Package)패키지는 ROS에서 가장 기본적인 소스코드 단위로, 노드, 메시지, 서비스 정의, 실행 스크립트 등이 포함된다.재사용성과 유지보수를 위해 관련 기능들을 하나의 패키지로 묶어 관리한다. 2. 노드 간 통신 구조메시지(Message)와 토픽(Topic)메시지는 노드 간에 주고받는 데이터 형식을 의미하며, 예를 들어 std msgs/String, sensor msgs/Image 등이 있다.토픽은 메시지를 주고받는 채널로, 하나..
 [2025 ROS 스터디] 김승현 #2주차-ROS의 중요컨셉, 명령어, 도구
ROS의 중요컨셉용어 Node - 최소 단위의 실행 가능한 프로세서. 하나의 실행가능한 프로그램. 각 노드는 메시지 통신으로 데이터를 주고 받는다.Package - 하나 이상의 노드, 노드 실행을 위한 정보 등을 묶어 놓은 것. 패키지의 묶음을 메타 패키지라 하여 따로 분리한다.Message - 메시지를 통해 노드간의 데이터를 주고 받는다. 메시지는 int, float, point, bool 같은 변수 타입이다. 메시지 통신 종류Topic - 단방향, 연속성을 가진 통신 방법. 메시지를 보내는 친구를 publisher node / 메시지를 받는 친구를 subscriber node. 1:1, 1:N, N:N 통신도 가능. (대표적 : 90%이상 사용) Service - 양방향, 일회..
[2025 ROS 스터디] 김승현 #2주차-ROS의 중요컨셉, 명령어, 도구
ROS의 중요컨셉용어 Node - 최소 단위의 실행 가능한 프로세서. 하나의 실행가능한 프로그램. 각 노드는 메시지 통신으로 데이터를 주고 받는다.Package - 하나 이상의 노드, 노드 실행을 위한 정보 등을 묶어 놓은 것. 패키지의 묶음을 메타 패키지라 하여 따로 분리한다.Message - 메시지를 통해 노드간의 데이터를 주고 받는다. 메시지는 int, float, point, bool 같은 변수 타입이다. 메시지 통신 종류Topic - 단방향, 연속성을 가진 통신 방법. 메시지를 보내는 친구를 publisher node / 메시지를 받는 친구를 subscriber node. 1:1, 1:N, N:N 통신도 가능. (대표적 : 90%이상 사용) Service - 양방향, 일회..
[2025 1학기 스프링부트 스터디] 이종윤 #3주차
실습해보기비즈니스 요구사항- 데이터: 회원ID, 이름- 기능: 회원등록, 조회- 아직 데이터베이스가 선정되지 않음 계층구조계층설명, 예시클래스Controller사용자의 요청을 받고, 응답을 돌려줌 (API or HTML View 반환)UserController, ApiControllerService실제 비즈니스 로직 처리 (계산, 조건 등)UserService, OrderServiceRepositoryDB와 직접 통신 (CRUD)UserRepository, JpaRepositoryModel데이터 구조 (DTO, Entity 등)User, Post, Person 등Domain핵심 비즈니스 개념, 규칙, 엔티티, 도메인 모델User, Order, Post, Comment 클래스 의존관계클래스설명MemberS..