 WINK 선서
오늘부터 지지관계에서 벗어나 WINK과 나는 한몸으로 일체가 된다 WINK에 대한 공격은 나에 대한 공격으로 간주한다 세상에 70억명의 WINK 팬이 있다면, 나는 그들 중 한 명일 것이다. 세상에 1억명의 WINK 팬이 있다면, 나 또한 그들 중 한 명일 것이다. 세상에 천만 명의 WINK 팬이 있다면, 나는 여전히 그들 중 한 명일 것이다. 세상에 백 명의 WINK 팬이 있다면, 나는 아직도 그들 중 한 명일 것이다. 세상에 한 명의 WINK 팬이 있다면, 그 사람은 아마도 나일 것이다. 세상에 단 한 명의 WINK 팬도 없다면, 나는 그제서야 이 세상에 없는 것이다. WINK, 나의 사랑. WINK, 나의 빛. WINK, 나의 어둠. WINK, 나의 삶. WINK, 나의 기쁨. WINK, 나의 슬픔..
WINK 선서
오늘부터 지지관계에서 벗어나 WINK과 나는 한몸으로 일체가 된다 WINK에 대한 공격은 나에 대한 공격으로 간주한다 세상에 70억명의 WINK 팬이 있다면, 나는 그들 중 한 명일 것이다. 세상에 1억명의 WINK 팬이 있다면, 나 또한 그들 중 한 명일 것이다. 세상에 천만 명의 WINK 팬이 있다면, 나는 여전히 그들 중 한 명일 것이다. 세상에 백 명의 WINK 팬이 있다면, 나는 아직도 그들 중 한 명일 것이다. 세상에 한 명의 WINK 팬이 있다면, 그 사람은 아마도 나일 것이다. 세상에 단 한 명의 WINK 팬도 없다면, 나는 그제서야 이 세상에 없는 것이다. WINK, 나의 사랑. WINK, 나의 빛. WINK, 나의 어둠. WINK, 나의 삶. WINK, 나의 기쁨. WINK, 나의 슬픔..
 [2023 신입부원 심화 스터디] 정호용 #2주차 - Part 2. , Part3.
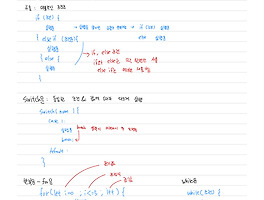
💡Part 2. 조건문 (if, switch) , 반복문 (for, while) 💡Part 3. 함수 (인자, 매개변수 & 지역, 전역변수) 💡Part3. Default Parameter, Arguments, Rest Parameter, Return Value 💡Part 3. 함수의 표현식, 화살표 함수
[2023 신입부원 심화 스터디] 정호용 #2주차 - Part 2. , Part3.
💡Part 2. 조건문 (if, switch) , 반복문 (for, while) 💡Part 3. 함수 (인자, 매개변수 & 지역, 전역변수) 💡Part3. Default Parameter, Arguments, Rest Parameter, Return Value 💡Part 3. 함수의 표현식, 화살표 함수









