 [2025 ROS 스터디] 홍동형 #2주차 - ROS 용어와 도구
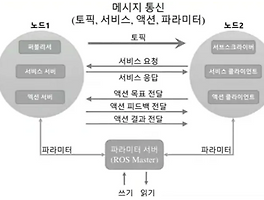
ROS 용어Node최소 단위의 실행 가능한 프로세스개발자가 마음대로 나눔(하나로 묶어버릴수도 있지만 그럼 ROS의 장점을 이용못함.)ex) 영상 촬영, 노이즈 제거 필터1, 필터2, 식별 …Package하나 이상의 노드, 노드 실행을 위한 정보 등을 묶어 놓은 것쉽게 말해 그냥 프로그램?ex) 얼굴 인식 출입 관리Message메시지를 통해 노드간의 데이터를 주고받게 된다(int, float, point, bool)변수형태, 메시지안에 메시지, 배열과 같은 구조도 사용메시지의 종류Topicpublisher → subscriber단방향 메시지, 연속성 방식1:N, N:1, N:N 도 가능Service양방향 메시지, 일회성 방식요구와 그에 따른 응답Action양방향 메시지Service와 비슷, 차이점은 중간의..
[2025 ROS 스터디] 홍동형 #2주차 - ROS 용어와 도구
ROS 용어Node최소 단위의 실행 가능한 프로세스개발자가 마음대로 나눔(하나로 묶어버릴수도 있지만 그럼 ROS의 장점을 이용못함.)ex) 영상 촬영, 노이즈 제거 필터1, 필터2, 식별 …Package하나 이상의 노드, 노드 실행을 위한 정보 등을 묶어 놓은 것쉽게 말해 그냥 프로그램?ex) 얼굴 인식 출입 관리Message메시지를 통해 노드간의 데이터를 주고받게 된다(int, float, point, bool)변수형태, 메시지안에 메시지, 배열과 같은 구조도 사용메시지의 종류Topicpublisher → subscriber단방향 메시지, 연속성 방식1:N, N:1, N:N 도 가능Service양방향 메시지, 일회성 방식요구와 그에 따른 응답Action양방향 메시지Service와 비슷, 차이점은 중간의..







